





























Drive profile
67
3 E
therC
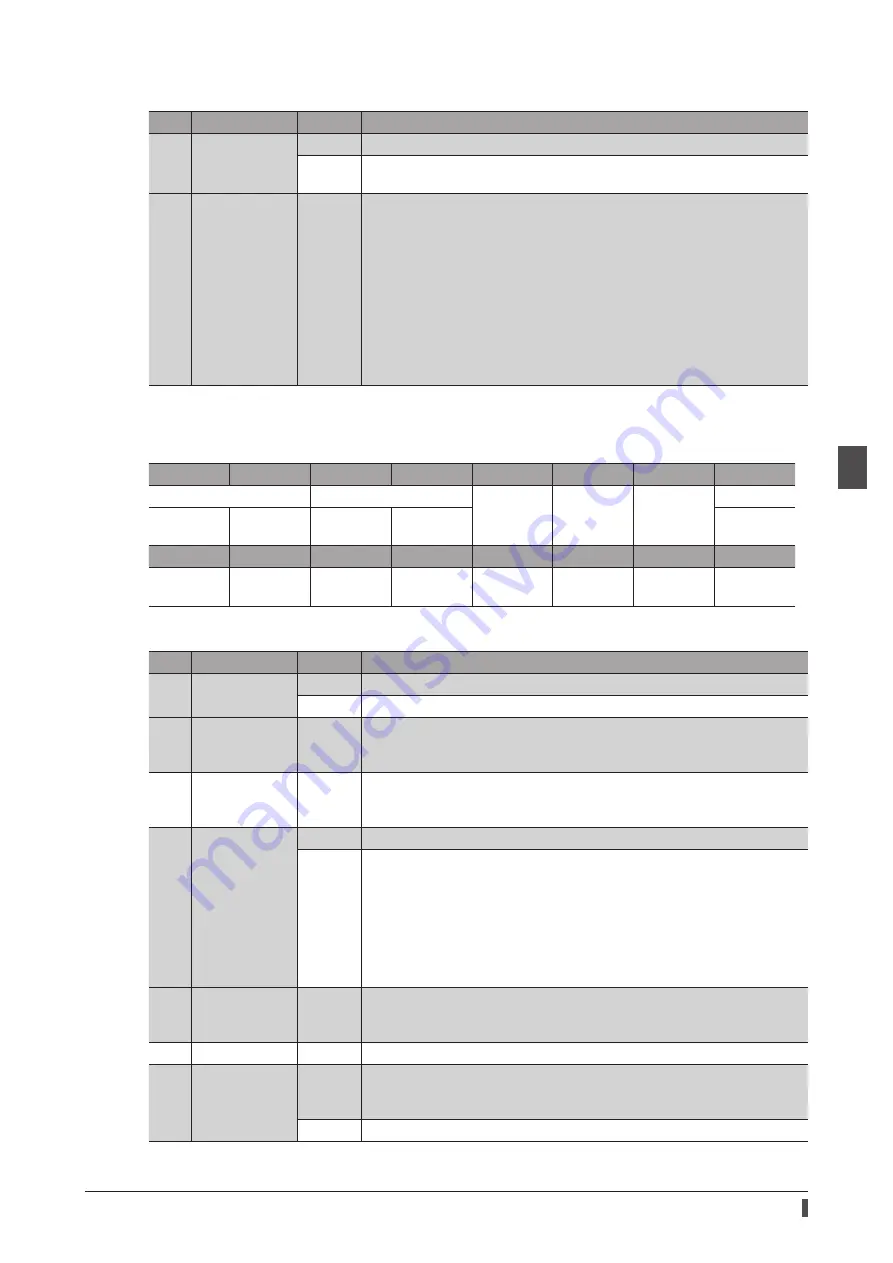
Details of Controlword
Bit
Name
Value
Description
8
Halt
0
Operation is allowed.
1
Stops the operation. The stopping method is in accordance with the setting
of the Halt option code (605Dh).
4
Homing
operation start
0 to 1
Start of return-to-home operation
If the "Homing operation start" is set to 0 during return-to-home operation,
the motor decelerates to a stop.
When the state is any of the followings, the command is not received, and
the operation is not started.
•
During operation
•
The Halt (6040h: Bit 8) has been set to 1.
•
The STOP input is being ON.
•
The drive state machine is other than "Operation enabled."
•
The motor is in a non-excitation state.
For Bit 7 and Bit 3 to Bit 0, refer to “State transition of drive state machine” on p.46.
Statusword of Homing mode
Bit 15
Bit 14
Bit 13
Bit 12
Bit 11
Bit 10
Bit 9
Bit 8
Manufacturer specific
Operation mode specific
Internal
limit active
Target
reached
Remote
ms
TLC
−
Homing
error
Homing
attained
−
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Warning
Switch on
disabled
Quick stop
Voltage
enabled
Fault
Operation
enabled
Switched
on
Ready to
switch on
z
Details of Statusword
Bit
Name
Value
Description
15
TLC
0
A load does not reach the upper limit of the motor output torque.
1
A load reached the upper limit of the motor output torque.
13
Homing error
0/1
Outputs the status of the motor based on a combination of values in the
Homing error, Homing attained (6041h: Bit 12), and Target reached (6041h:
Bit 10). Refer to the next table for details.
12
Homing
attained
0/1
Outputs the status of the motor based on a combination of values in the
Homing error (6041h: Bit 13), Homing attained, and Target reached (6041h:
Bit 10). Refer to the next table for details.
11
Internal limit
active
0
The function limitation by the internal limit is not in an active state.
1
The function limitation by the internal limit became an active state.
The value changes to 1 when any of the following internal limit functions is
being activated.
•
Limit sensor (FW-LS/RV-LS)
•
Operation prohibition input (FW-BLK/RV-BLK)
•
Software limit
•
Mechanism limit
10
Target reached
0/1
Outputs the status of the motor based on a combination of values in the
Homing error (6041h: Bit 13), Homing attained (6041h: Bit 12), and Target
reached. Refer to the next table for details.
9
Remote
1
The value changes to 1 when the initialization is completed.
7
Warning
0
Information is not generated.
When the cause of information is cleared, the Warning is automatically
cleared to 0.
1
Information is being generated.
For Bit 6 to Bit 0, refer to “Status output of drive state machine” on p.47.
Содержание aSTEP AZ mini Driver
Страница 14: ...14 1 Introduction...
Страница 128: ...128 3 EtherCAT communication...
Страница 146: ...146 4 Object list...
Страница 164: ...164 5 Troubleshooting...
Страница 170: ...170 6 Reference materials...
Страница 171: ...171 6 Reference materials...







































































