





























Drive profile
66
3 E
therC
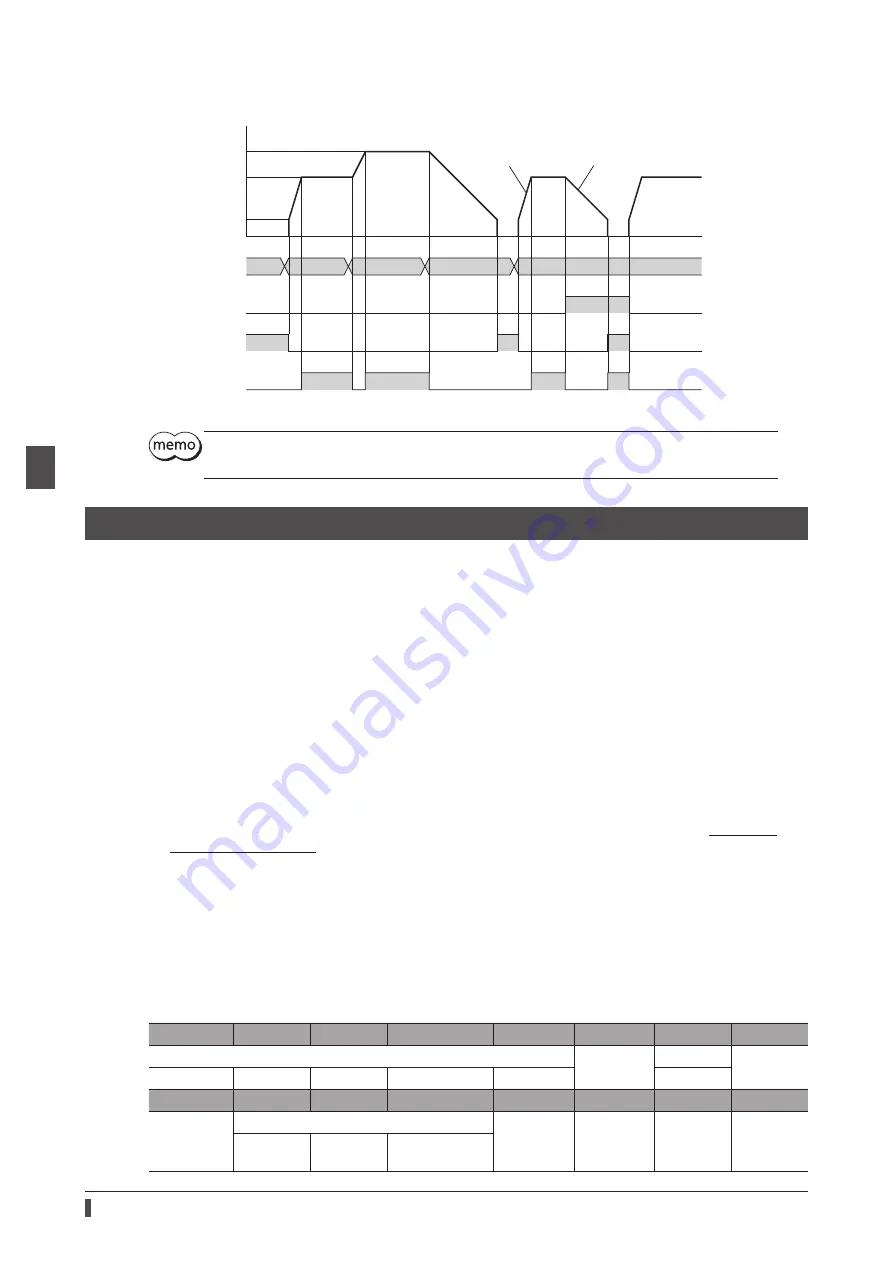
Operation in Profile velocity mode
Reference speed
V2
V1
Starting speed
(4142h)
0
V1
V2
0
V1
Target speed
(60FFh)
Halt
(6040h: Bit 8)
V1, V2: velocity
Speed
(6041h: Bit 12)
Target reached
(6041h: Bit 10)
Profile deceleration
(6084h)
Trigger input
(6083h)
When the Type (6040h: Bit 13, Bit 12) is set to continuous operation (torque control), self-start
operation (rectangular operation) at the Target velocity (60FFh) is performed.
3-7
Homing mode (HM)
The Homing mode is used to set the home. A path generation (profile generation) is performed in the driver.
If return-to-home operation is performed, the position preset (P-PRESET) is executed when the operation is
completed, and the home will be the value set in the Home offset (607Ch).
z
Related objects
Refer to “Selection of Homing (return-to-home) method” on p.68.
Before starting operation; When a motorized actuator is used
For parameters of the
AZ
Series, the different values have been stored in the ABZO sensor and the driver, respectively.
The values based on the product specifications are stored in the ABZO sensor. The values stored in the ABZO sensor
cannot be changed because of the fixed value. Meantime, the values for the standard type (motor only) are stored in
the driver parameters.
In a state of the factory shipment, the parameter information (fixed value) stored in the ABZO sensor is used
preferentially. Since parameters stored in the driver are prioritized in the Homing mode, change the setting according
to the following steps.
1. Copy the ABZO information (fixed value) of the ABZO sensor to the driver. Refer to the
AZ
Series OPERATING
MANUAL Function Edition for details.
2. Change the JOG/HOME/ZHOME operation setting (47F5h) to "1: Manual setting."
3. Change the Homing method (6098h) to "−1: Return-to-home of our specifications."
4. Execute the Write batch NV memory (40C9h).
5. Turn on the main power supply and control power supply of the driver again.
With these steps, the driver parameters will be prioritized.
Controlword of Homing mode
Bit 15
Bit 14
Bit 13
Bit 12
Bit 11
Bit 10
Bit 9
Bit 8
Manufacturer specific (ms)
Reserved
oms
Halt
−
−
−
−
−
−
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Fault reset
Operation mode specific (oms)
Enable
operation
Quick stop
Enable
voltage
Switch on
−
−
Homing
operation start
Содержание aSTEP AZ mini Driver
Страница 14: ...14 1 Introduction...
Страница 128: ...128 3 EtherCAT communication...
Страница 146: ...146 4 Object list...
Страница 164: ...164 5 Troubleshooting...
Страница 170: ...170 6 Reference materials...
Страница 171: ...171 6 Reference materials...







































































