





























136
3.4.10 Control Signals for Remote I/O Mode
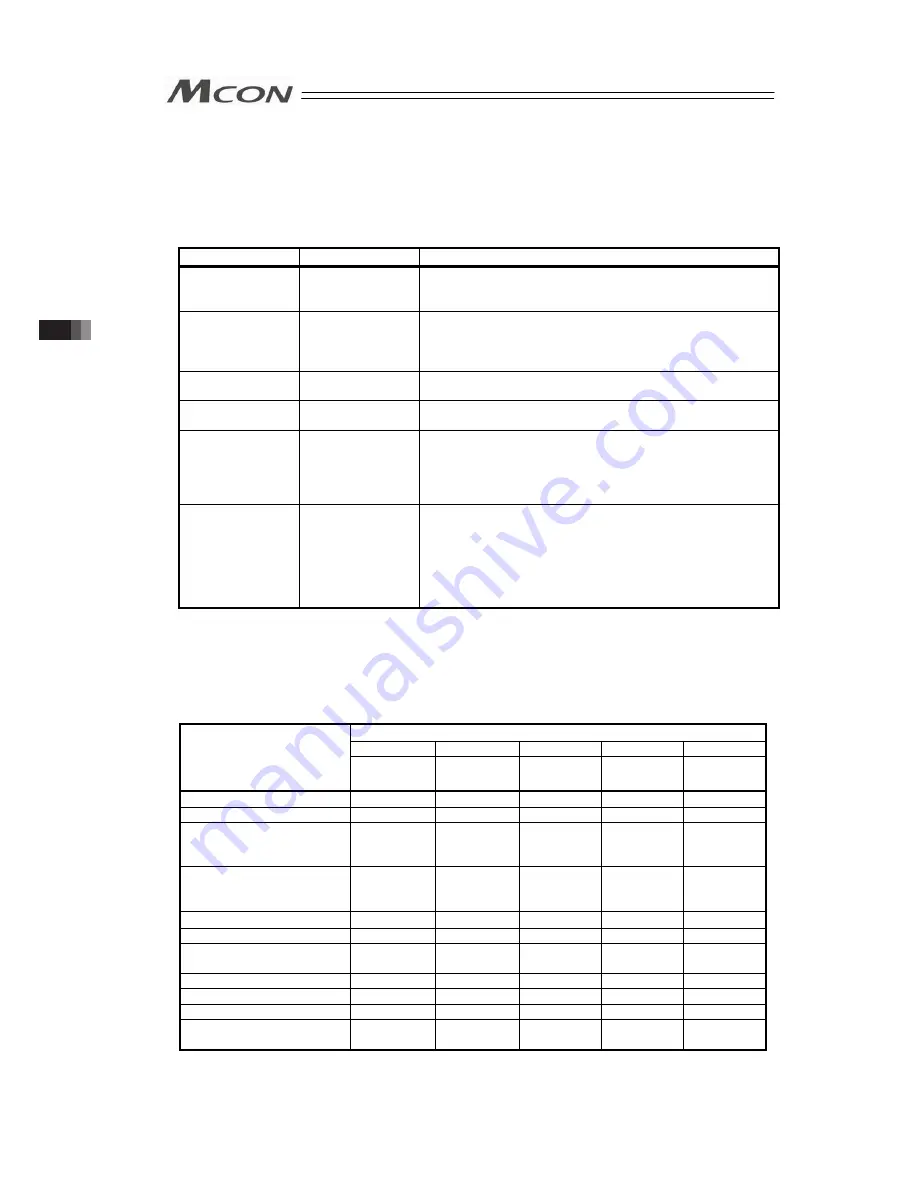
It is an operation mode to control with ON/OFF of bits as it is done in PIO (24V I/O).
Set the position data from a teaching tool such as the RC PC software.
The number of positioning points depends on the operation pattern (PIO pattern) set in the
parameters of MCON unit.
The I/O specifications for the operation pattern are described as follows.
PIO Pattern
Operation Mode
I/O Specification
0
Positioning mode
Position number specification 64 points
Zone signal output 1 point
(Note1)
Position zone signal output
(Note 2)
1 point
1
Teaching mode
Positioning points 64 points
Position zone signal output
(Note 2)
1 point
Jog operation is available
The current position can be written to a specified position.
2
256-point mode
Positioning points 256 points
Position zone signal output
(Note 2)
1 point
3
–
Unavailable.
Parameter data error would be generated if setting is made.
4
Solenoid valve
mode 1
Positioning points 7 points
Zone signal output
1 point
(Note 1)
Position zone signal output
(Note 2)
1 point
Operation command available only with position number
indication
5
Solenoid valve
mode 2
Positioning points 3 points
Zone signal output
1 point
(Note 1)
Position zone signal output
(Note 2)
1 point
The actuator is operated by specifying forward, backward and
intermediate position commands.
Complete signal is able to output a signal equivalent to the
limit switch
Note 1
Set the range of the zone in parameter. It becomes constantly valid once the home-return operation is
complete.
Note 2
The range of the zone is to be set in the position table, and is activated only when that position number is
indicated. It is invalid in other position number commands. The position zone signal can be switched over
to the zone signal with the setting of Parameter No.149.
The functions capable to control in this mode are as described in the table below.
{
: Operation available ×: Operation not available
Operation Pattern (PIO Pattern)
0
1
2
4
5
ROBO cylinder function
Positioning
Mode
Teaching
Mode
256 points
Mode
Solenoid
Valve Mode 1
Solenoid
Valve Mode 2
Home-return operation
{
{
{
{
{
(Note 3)
Positioning operation
{
{
{
{
{
Speed and
acceleration/deceleration
setting
{
{
{
{
{
Separate settings for
acceleration and
deceleration
{
{
{
{
{
Pitch feed (Incremental)
{
{
{
{
×
Pressing operation
{
{
{
{
{
Speed change during
movement
{
{
{
×
{
Pause
{
{
{
{
{
(Note 4)
Zone signal output
{
{
(Note 5)
{
(Note 5)
{
{
Position zone signal
{
(Note 5)
{
(Note 5)
{
(Note 5)
{
(Note 5)
{
(Note 5)
Vibration control
(For servo motor type only)
{
{
{
{
{
Note 3
Home-return operation is performed in the first movement command.
Note 4
It is available when the parameter No.27 of “Movement Command Type” is set to “0”.
Note 5
Select either of the zone signal output or position zone signal output in Parameter No. 149.
3.4 Fieldbus
Type
Address Map
Содержание MCON-C
Страница 1: ...MCON C CG Controller Instruction Manual Fourth Edition ...
Страница 2: ......
Страница 22: ...12 International Standards Compliances MCON with the following overseas standard RoHS Directive CE Marking UL ...
Страница 48: ...38 Chapter 1 Specifications Check ...
Страница 264: ...254 Note 1 blinking Note 2 single flash Note 3 double flash Timing of LED flashing 3 10 Fieldbus Status LEDs ...
Страница 268: ...258 3 10 Fieldbus Status LEDs ...
Страница 274: ...264 Chapter 4 Vibration Suppress Control Function ...
Страница 278: ...268 Chapter 5 Collision Detection Feature ...
Страница 284: ...274 Chapter 6 Power saving Function ...
Страница 292: ...282 Chapter 7 Absolute Reset and Absolute Battery ...
Страница 358: ...348 Chapter 9 Troubleshooting ...
Страница 368: ...358 4 TP adapter and accessories 1 TP adapter external dimensions RCB LB TGS Chapter 10 Appendix ...
Страница 474: ...Chapter 10 Appendix 464 ...
Страница 478: ......
Страница 479: ......







































































