





























8 Safety Function
8 - 12
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
The dynamic brake operates according to the setting of the
Stop Selection
–
Shutdown Option Code
(3B20-01 hex).
8-3-2
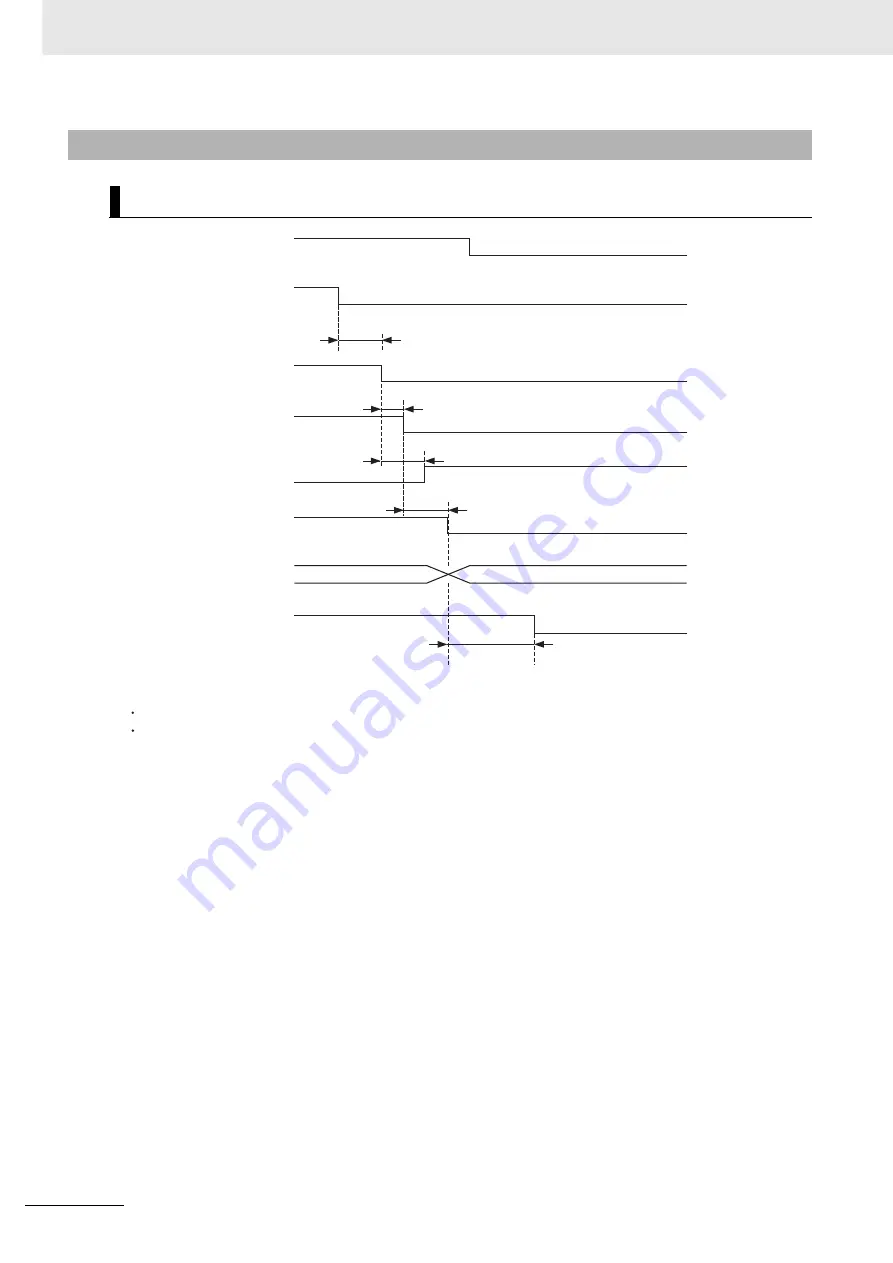
Operation Example
Operation Timing to a Safe State
on
off
Operation enabled
Switched on disabled
PDS state
Brake Interlock
Output (BKIR)
Communication time is determined by
the following factors.
Safety CPU Unit cycle time
EtherCAT
Communications cycle
Inactive
Active
T
Reset STO
STO command
at Safety CPU Unit
at Servo Drive
at Servo Drive
Motor power status
Activate STO
Communication time
Activate STO
Reset STO
Normal status
7 ms max.
10 ms max.
15 ms max.
T is determined by a set value of the following objects, whichever comes earlier.
4610-02 hex
4610-03 hex
:
Brake Interlock Output
–
Timeout at Servo OFF
:
Brake Interlock Output
–
Threshold Speed at Servo OFF
Servo ON
Servo OFF
Reaction time
DB released
DB applied
Dynamic brake
Servo ON/OFF
STO command
STO status
STO status
Summary of Contents for R88D-1SN ECT Series
Page 973: ......