





























4 . P o s i t i o n i n g U n i ts
MN05003006E F or more information visit:
w w w. e a t o n . c o m
4-21
When P(II) is a negative value, the motor will be in reverse rotation.
3.
The multiplication of P(II) should be modified according to the settings in b2 and b3
of CR#5.
C R # 2 9 , 3 0 :
Operation speed (II) (V(II))
1.
Range: -2,147,483,648 ~ +2,147,483,647 (The units are set in b0 and b1 of CR#5).
2.
The range is 10 ~ 200KPPS pulses. Pulses exceeding 200K will output at 200K;
pulses less than 10 will output at 10.
3.
Range limitation: V
MAX
> V(II) > V
BIAS
.
C R # 3 1 :
Operation instruction
1.
CR#31_b0 : error reset; timing: 0
→
1
b[0] = 1: The error will be reset. The ERROR indicator will be off and the flag in
CR#38_b5 (for MC01) will be reset to “0”.
2.
CR#31_b1: software STOP; timing: 0
→
1
b[1] = 0
→
1: The function is the same as external force STOP. The MC01 position
control module will decelerate and stop positioning.
3.
CR#31_b2: stop forward pulses; timing: 1
b[2] = 1: Running forward is forbidden, and the running forward instruction will be
invalid. An error message will appear if a running forward instruction is given.
4.
CR#31_ b3: stop reverse pulses; timing: 1
b[3] = 1: Running reverse is forbidden, and the running reverse instruction will be
invalid. An error message will appear if a running reverse- instruction is given.
5.
CR#31_b4: enabling JOG+
b[4] = 1: JOG+ sends out forward pulses (CW)
6.
CR #31_b5: enabling JOG-
b[5] = 1: JOG- sends out reverse pulses (CCW)
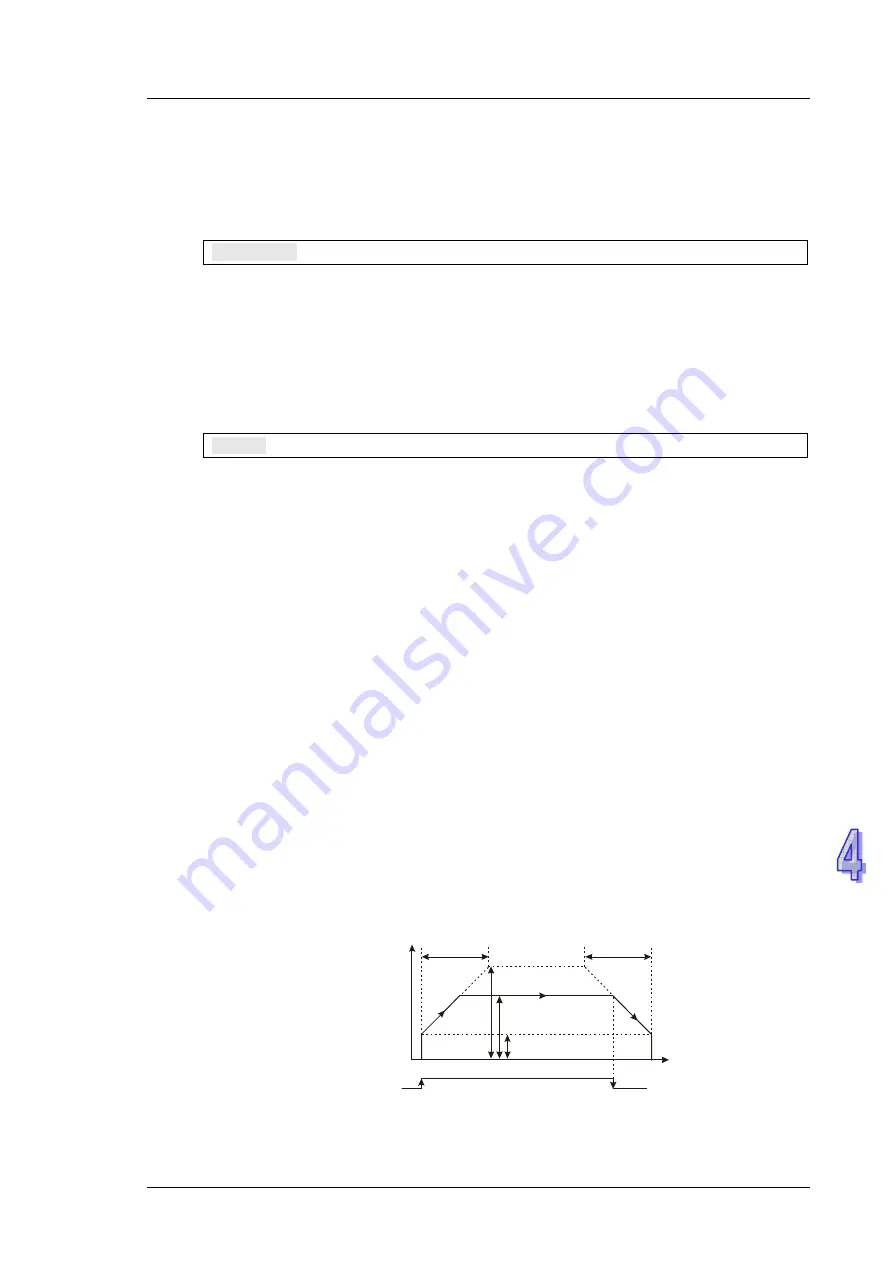
Speed
T
ACC
T
DEC
V
MAX
Time
V
BIAS
JOG
V
JOG
7.
CR#31_b6: enabling zero return







































































