





























00
10
11
01
00
10
11
01
Correct State Transitions
Erroneous State Transitions
+1
1
Sensor B
(Signal PPUS2)
Sensor A
(Signal PPUS1)
A
B
A
A
A
A
B
B
B
B
A
B
Sensor A
(Signal PPUS1)
Sensor B
(Signal PPUS2)
Sensor B
(Signal PPUS2)
Sensor A
(Signal PPUS1)
90
45
01
11
10
00
01
11
10
Damping or “dark” area.
ESI Operation
991
SLAU367P – October 2012 – Revised April 2020
Copyright © 2012–2020, Texas Instruments Incorporated
Extended Scan Interface (ESI)
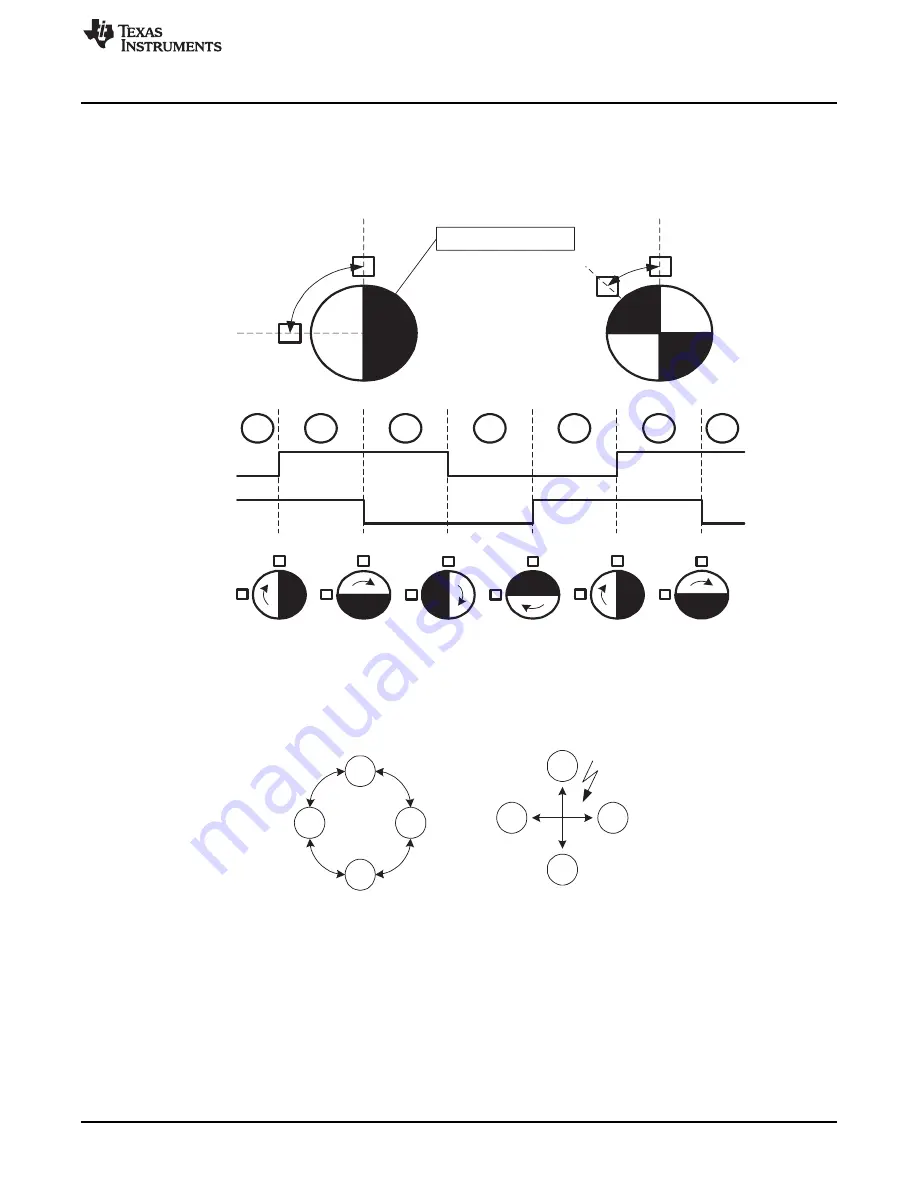
37.2.8.3 Quadrature Decoding
The ESI can be used to decode quadrature-encoded signals. Signals that are 90° out of phase with each
other are said to be in quadrature. To Create the signals, two sensors are positioned depending on the
slotting, or coating of the encoder disk.
shows two examples for the sensor positions and a
quadrature-encoded signal waveform.
Figure 37-20. Sensor Position and Quadrature Signals (S1=PPUS1, S2=PPUS2)
Quadrature decoding requires knowing the previous quadrature pair S1 (PPUS1) and S2 (PPUS2), as well
as the current pair. Comparing these two pairs will tell the direction of the rotation. For example, if the
current pair is 00 it can change to 01 or 10, depending on direction. Any other change in the signal pair
would represent an error as shown in
Figure 37-21. Quadrature Decoding State Diagram
To transfer the state encoding into counts it is necessary to decide what fraction of the rotation should be
counted and on what state transitions. In this example only full rotations will be counted on the transition
from state 00 to 01 or 10 using a 180° disk with the sensors 90° apart. All the possible state transitions
can be put into a table and this table can be translated into the corresponding state table entries for the
processing state machine as shown in







































































