





























Commander SE Advanced User Guide
173
Issue Number: 4
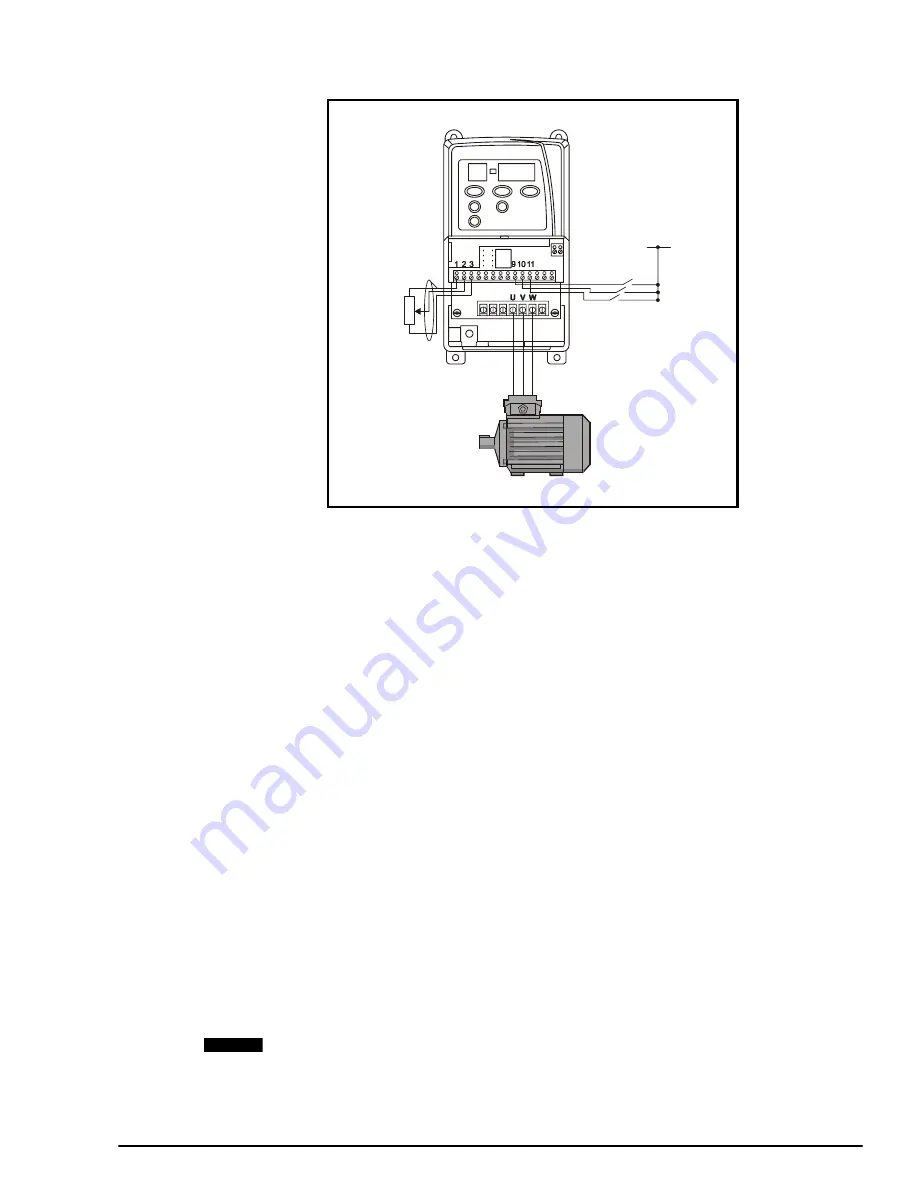
12.12 Setting up Commander SE in torque mode
As well as the ability to control the drive in standard speed mode, the Commander SE can be programmed to accept a torque
reference and hence operate in torque control. Below is an example of how to set up the drive:
Parameter set-up
Set
7.10
=
4.08
Analog input 1 assigned to torque reference.
Set
4.11
= 1
Enable torque mode.
Adjusting the current loop gains
4.13
and
4.14
can give improved system stability and response if required.
Perform a Save routine:
xx.00
= 1000 and press red Stop / Reset button on the drive.
Instability in torque control mode
When operating the drive in torque control with a lightly loaded motor, instability can occur. This is a result of the drive’s
internal current controller becoming unstable. An increase in motor load will help the motor to stabilise, however, in lightly
loaded conditions, increasing the proportional gain
4.13
will have the same effect.
12.13 Torque control with speed override
The Commander SE can be set up in torque control with speed override using the 2 analog inputs.
Parameter set-up
7.10
=
4.08
Analog input 1 destination parameter to torque reference
7.14
=
1.06
Analog input 2 destination parameter to control maximum speed clamp
7.12
=
0.04
Analog input 2 scaling set to limit maximum speed clamp to approx. 50Hz
4.11
= 1
Torque mode selector selected
If torque control is required in the forward and reverse direction the a digital input can be used to invert the torque
reference input:
8.39
= 1
Terminals 12 & 13 auto set-up disabled
8.26
=
7.09
Terminal 13 to control Analog input 1 invert bit. The direction of rotation is controlled by the polarity of the
analog input and not by the run forward or run reverse terminals.
Positive torque reference = forward motor direction
Negative torque reference = reverse motor direction
Perform a Save routine:
xx.00
= 1000 and press red Stop / Reset button on the drive.
Operation
Analog input 1 will control the torque reference input, 0 to 10V = 0 to 150%
Analog input 2 will control the maximum speed clamp
1.06
, therefore the speed can be clamped anywhere between 0 and
maximum speed.
When using analog input 2 to control parameter 1.06, zero to full scale on the analog input will equal 0 to 1000Hz.
Therefore the scaling parameter 7.12 should be set to the appropriate value to limit the maximum frequency.
Drive Enable
Run Forward
Run Reverse
Torque
Reference
Potentiometer
+24V
NOTE
Содержание COMMANDER SE
Страница 76: ...76 Commander SE Advanced User Guide Issue Number 4...
Страница 93: ...Commander SE Advanced User Guide 93 Issue Number 4...
Страница 98: ...98 Commander SE Advanced User Guide Issue Number 4...
Страница 142: ...142 Commander SE Advanced User Guide Issue Number 4 Figure 6 9 Input line reactor 4400 0241 All dimensions in mm...
Страница 144: ...144 Commander SE Advanced User Guide Issue Number 4 Figure 7 3 Commander SE Size 4 All dimensions in mm...







































































