





























56
Commander SE Advanced User Guide
Issue Number: 4
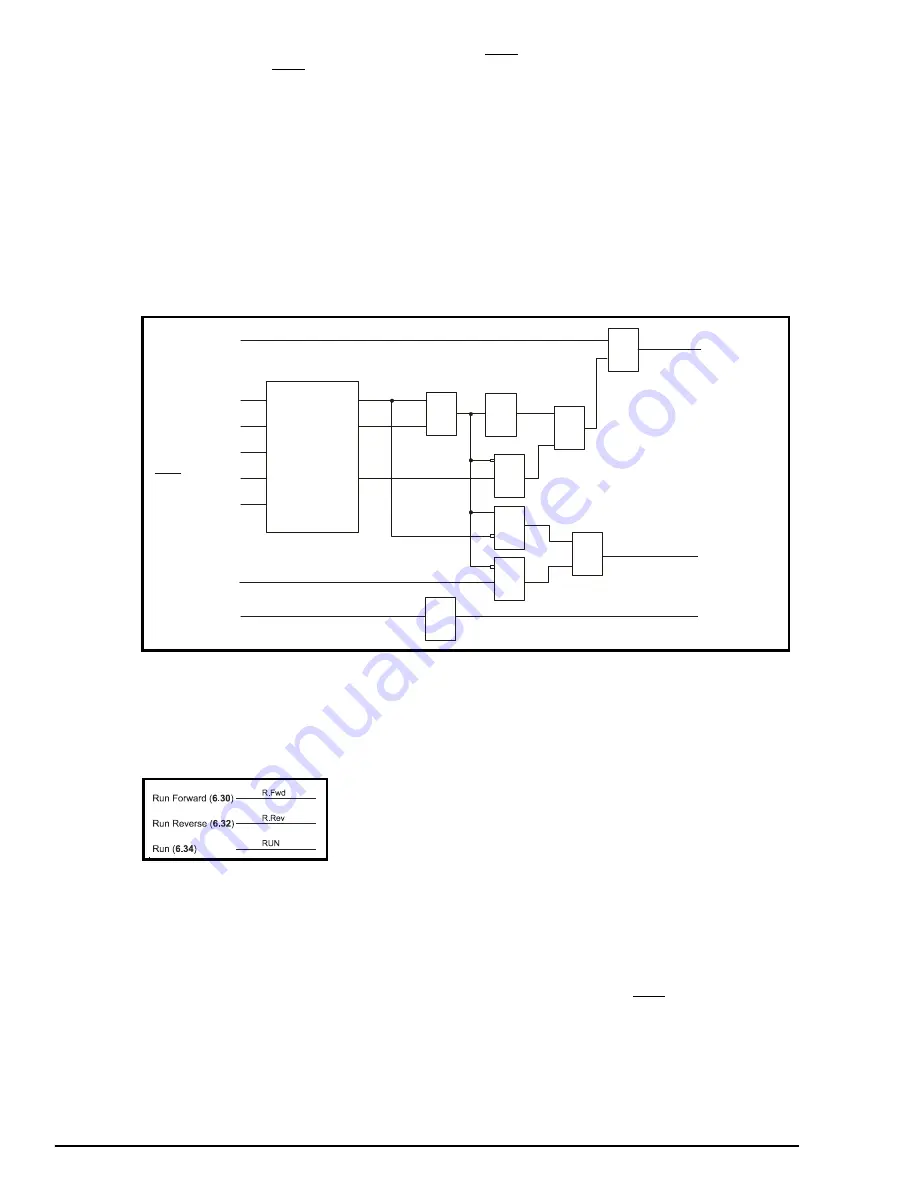
Latches are also available for each of the three run inputs, Run Forward, Run Reverse and Run, allowing them to become
active from momentary inputs. When enabled, by setting
6.04
, a
STOP
input must also be applied by using a digital input to
program
6.39
. When the
STOP
input becomes inactive each of the three latches are reset. When the latches are disabled,
clearing
6.04
, they become transparent.
As default terminal 10 and 11 are configured as Run Forward and Run Reverse terminals. When either run forward or run
reverse is selected, there is 65ms delay within the drives software before the drive will actually run forward or reverse. If the
drive is running forward, there is also this delay when the run forward terminal is opened and the run reverse terminal is
closed and vice-versa.
This 65ms delay is to allow the drive to change direction of motor rotation without entering the
stopping mode
i.e. if DC
injection braking mode was enabled and there was no 65ms delay, when the run forward terminal was opened, the drive
would immediately go into the DC injection braking mode rather than ramp down and then ramp back up to set speed in the
reverse direction.
This 65ms delay can cause problems in some applications where a very fast response to the digital inputs is required.
One solution to the above is to change the set-up of the terminals so that this 65ms does not have an effect. If terminal 10 is
set-up as a run terminal and terminal 11 is set-up as a forward/reverse terminal, this 65ms delay does not have an effect. The
only delay now is the sample time of the software.
Notes
1. The drive runs at the user reference when RUN is active and JOG is not active
2. The drive runs at the jog reference when JOG and RUN are active
3. The inverter is allowed to become active when drive enable is active
4. REVERSE produces a negative reference
5. TMR represents a component that gives an active output immediately after the input becomes active, but the output
becomes inactive after a timeout following the input becoming inactive
When the latching mode is disabled, parameter
6.40
= 0, the latches box becomes transparent.
Notes on Jog:
To allow the drive to run at the jog speed from standstill the jog input should be made active before the run input, (provided be
either run forward run reverse or run), this ensures that the drive does not run at the normal speed reference selected in
menu 1. If the run input is active before the jog the drive will select the normal reference in menu 1 and will act upon the jog
reference as soon as the jog input is activated.
When the drive is required to stop after having been running at the jog speed, the jog is held active within the drive for a
further 100ms. This provides a delay to allow the jog to be deactivated before the run is deactivated and does not allow the
drive to run at the normal speed reference in menu 1 prior to the drive stopping.
When the latching mode is selected, parameter
6.04
= 1, the following latches are used. The STOP input resets all of the
latches. The Run Forward and Run Reverse are made to operate independently by resetting the opposing direction latch
whenever a single direction is set.
Drive enabled
(
)
6.15
Run Forward (
)
6.30
Run Reverse (
)
6.32
Run (
)
6.34
STOP (
)
6.39
Latch enable (
)
6.04
LATCHES
Forward/Reverse
(
)
6.33
Jog (
)
6.31
XOR
TMR
65ms
Jog (
)
1.13
REVERSE (
)
1.12
RUN (
)
1.11
AND
AND
AND
AND
OR
OR
TMR
100ms
R.Fwd
R.Rev
RUN
Содержание COMMANDER SE
Страница 76: ...76 Commander SE Advanced User Guide Issue Number 4...
Страница 93: ...Commander SE Advanced User Guide 93 Issue Number 4...
Страница 98: ...98 Commander SE Advanced User Guide Issue Number 4...
Страница 142: ...142 Commander SE Advanced User Guide Issue Number 4 Figure 6 9 Input line reactor 4400 0241 All dimensions in mm...
Страница 144: ...144 Commander SE Advanced User Guide Issue Number 4 Figure 7 3 Commander SE Size 4 All dimensions in mm...







































































