





























Technical Documentation
VeriSens
®
v2.11.0-B4
413/429
Baumer Optronic GmbH
Radeberg, Germany
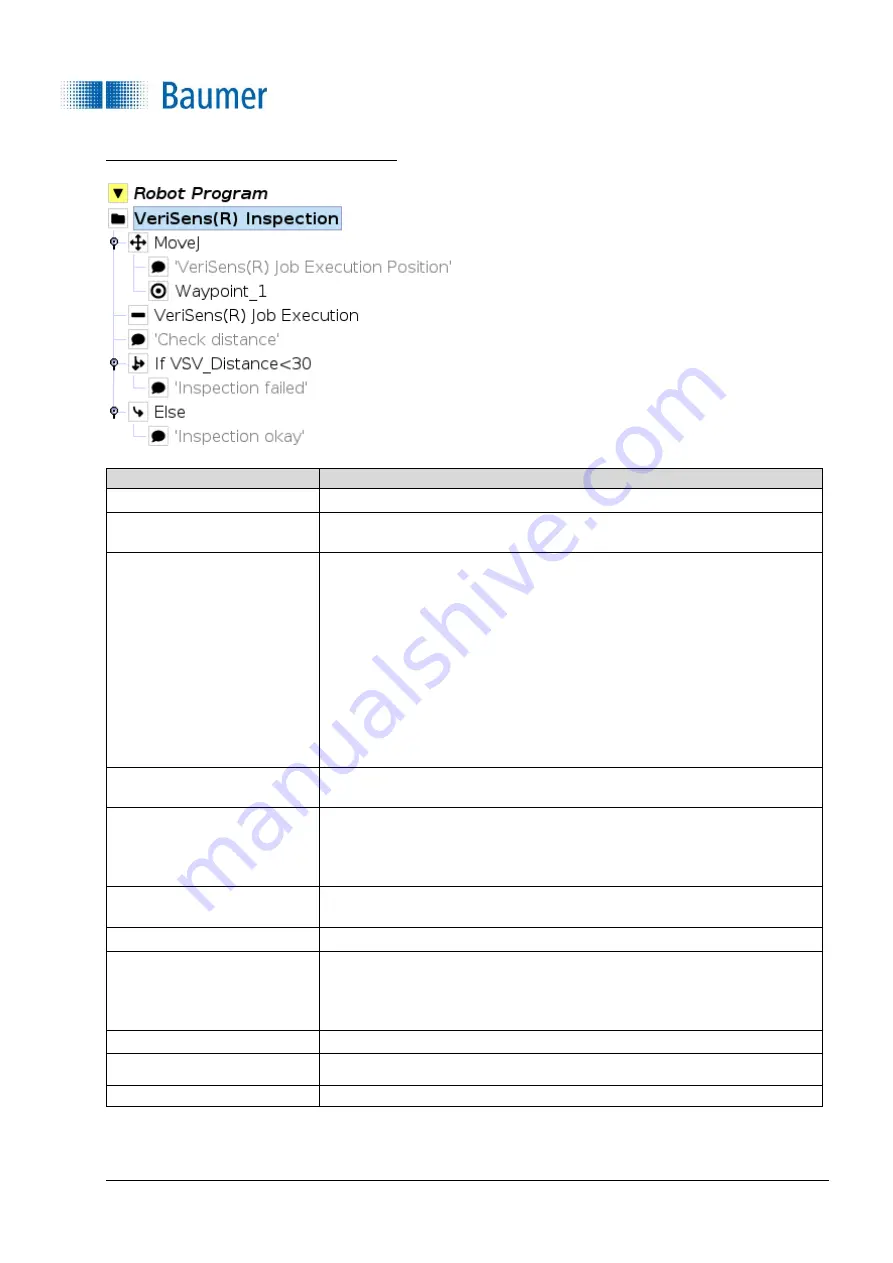
Settings on the robot controller (PolyScope)
Program point
Settings
Robot Program
Vision Sensor
Inspection
Name of the program
MoveJ
Definition of the type of movement with which the robot should move.
Where the robot should then move is determined later.
MoveJ =
the robot moves its joints freely, it can rotate to the desired
position
MoveL =
the robot moves in a straight line (linear) from one point to the
next
MoveP =
the robot can make circular movements
‘Vision Sensor Job
Execution Position’
Comment
Waypoint_1
Position where the robot should move to in order to perform the vision
sensor job. For example, in the case of stationary installation of the vision
sensor, the robot must be moved out of the field of view of the vision
sensor so the test object can be found in the work area.
Vision Sensor Job
Execution
The job (
Distance
) stored on the vision sensor is selected here.
‘Check distance’
Comment
If VSV_Distance<30
The
VSV_Distance
variable represents the distance determined with the
vision sensor and transmitted to the robot controller via the process
interface . Subsequently, it can be determined what should happen if this
distance is smaller or larger than 30.
‘Inspection failed’
Comment
Else
The Else branch specifies what to do if the distance is less than 30.
‚Inspection okay‘
Comment





















































