





























Technical Documentation
VeriSens
®
v2.11.0-B4
397/429
Baumer Optronic GmbH
Radeberg, Germany
The prerequisite for finding and transferring object positions is the calibration of the vision sensor with the
optional steps listed above (
Distortion correction
,
Z calibration
).
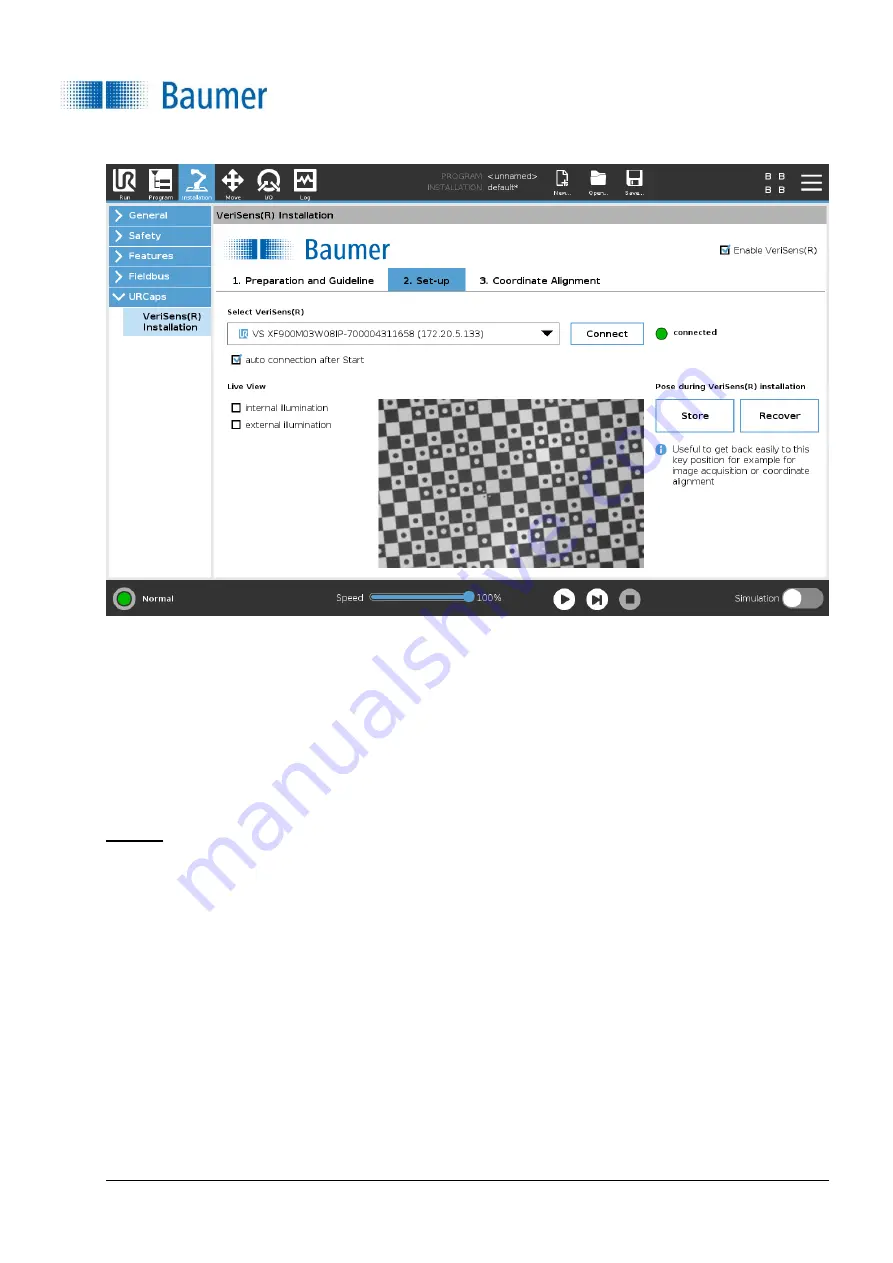
For dynamically installed vision sensors, it is recommended to save the position (pose) of the calibration
position at this point at the latest.
Pose of vision sensor during installation
This is supported by the buttons
Save
and
Restore
. Possible applications for this are the re-calibration of the
coordinates or the image acquisition from this optimal position.
Options
Automatic connection after startup
Here, an attempt is made to connect to the last selected vision sensor when the robot is powered up. The
vision sensor may also have been renamed via
Application Suite
.
The lighting settings below will be reactivated.
If no coordinates of found objects are to be passed on to the UR, then the vision sensor setup is completed
here.
Internal illumination
It may be possible to improve the image quality during live viewing via the internal illumination during
installation; it can be switched on here (not for vision sensors with C-mount interface).
External illumination
It may be possible to improve the image quality during live viewing via the external illumination during
installation. This function can be activated here (if available).





















































