





























Information Manual
DSP1611/17/18/27/28/29 DIGITAL SIGNAL PROCESSOR
April 1998
JTAG Test Access Port
Lucent Technologies Inc.
DRAFT COPY
11-17
11.3 Elements of the JTAG Test Logic
(continued)
11.3.6 The Device Identification Register—JIDR (continued)
A description of each field for the DSP1617/18/27/28/29 only follows:
The Manufacturer Identity Field: Bits 11—0 of the JIDR make up the manufacturer identity field containing a
compressed form of the JEDEC standard manufacturer's identification code. The assigned Lucent Technologies
identification code is 0x03B.
Part Number Field: Bits 18—12 contain the DSP1617/18/27/28/29 unique part number. The ROM code is con-
tained in bits 27—19.
The Version Field: Bits 31—28 contain the RESERVED, SECURE, and CLOCK fields as described in
.
A DR-scan cycle of the JIDR produces a 32-bit binary pattern with the LSB being shifted out first from the TDO dur-
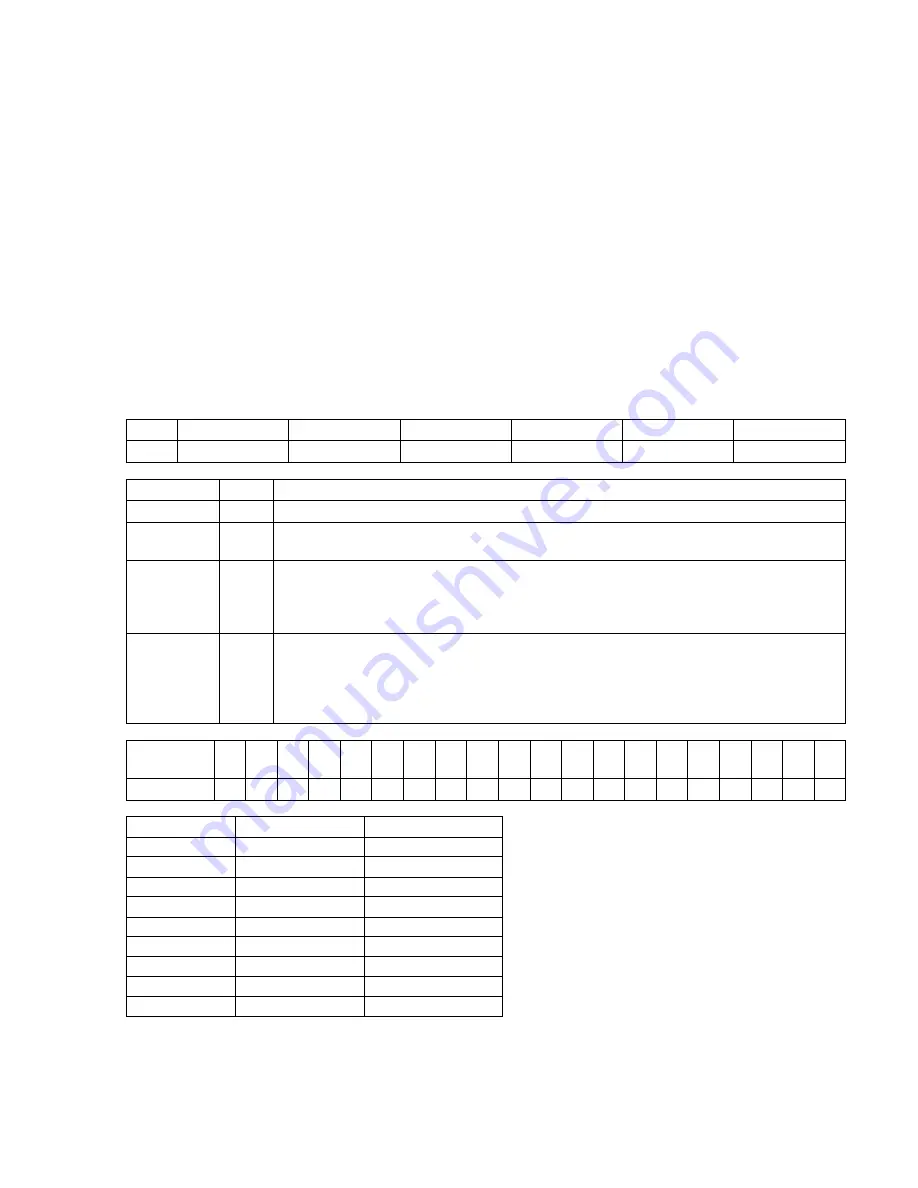
ing the shift-DR state. The following table summarizes the fields of JIDR for the DSP1617/18/27/28/29 only.
Table 11-5. JIDR Field Descriptions DSP1617/18/27/28/29
Bit
31
30
29—28
27—19
18—12
11—0
Field
RESERVED
SECURE
CLOCK
ROMCODE
PART ID
0x03B
Field
Value
Mask-Programmable Features
RESERVED
0
SECURE
0
1
Nonsecure ROM option.
Secure ROM option.
CLOCK
00
01
10
11
TTL level input clock option.
Small-signal input clock option.
Crystal oscillator input clock option.
CMOS level input clock option.
ROMCODE
—
Users ROMCODE ID:
The ROMCODE ID is the 9-bit binary value of the following expression:
(20 x value for first letter) + (value of second letter), where the values of the letters are in
the following table. For example, ROMCODE GK is
(20 x 6) + (9) = 129 or 0 1000 0001.
ROMCODE
LETTER
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
S
T
U
W
Y
VALUE
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
PART ID
Part ID (HEX)
Part ID (Binary)
DSP1617
0x18
0011000
DSP1618
0x19
0011001
DSP1618x24
0x1D
0011101
DSP1627
0x1C
0011100
DSP1627x32
0x2C
0101100
DSP1628x08
0x2A
0101010
DSP1628x16
0x2A
0101010
DSP1629x10
0x29
0101001
DSP1629x16
0x29
0101001
Summary of Contents for DSP1611
Page 18: ...Chapter 1 Introduction...
Page 27: ...Chapter 2 Hardware Architecture...
Page 52: ...Chapter 3 Software Architecture...
Page 116: ...Chapter 4 Instruction Set...
Page 154: ...Chapter 5 Core Architecture...
Page 176: ...Chapter 6 External Memory Interface...
Page 208: ...Chapter 7 Serial I O...
Page 237: ...Chapter 8 Parallel I O DSP1617 Only...
Page 261: ...Chapter 9 Parallel Host Interface PHIF DSP1611 18 27 28 29 Only...
Page 275: ...Chapter 10 Bit I O Unit...
Page 284: ...Chapter 11 JTAG Test Access Port...
Page 306: ...Chapter 12 Timer...
Page 313: ...Chapter 13 Bit Manipulation Unit...
Page 325: ...Chapter 14 Error Correction Coprocessor DSP1618 28 Only...
Page 350: ...Chapter 15 Interface Guide...
Page 367: ...Appendix A Instruction Encoding...
Page 379: ...Appendix B Instruction Set Summary...
Page 381: ...aD extractz aS IM16 B 52 aD insert aS arM B 53 aD insert aS IM16 B 54 aD aS aaT B 55...
Page 437: ...Index...







































































