





























User Manual of EM730/EM730E Series Inverter
157
function.
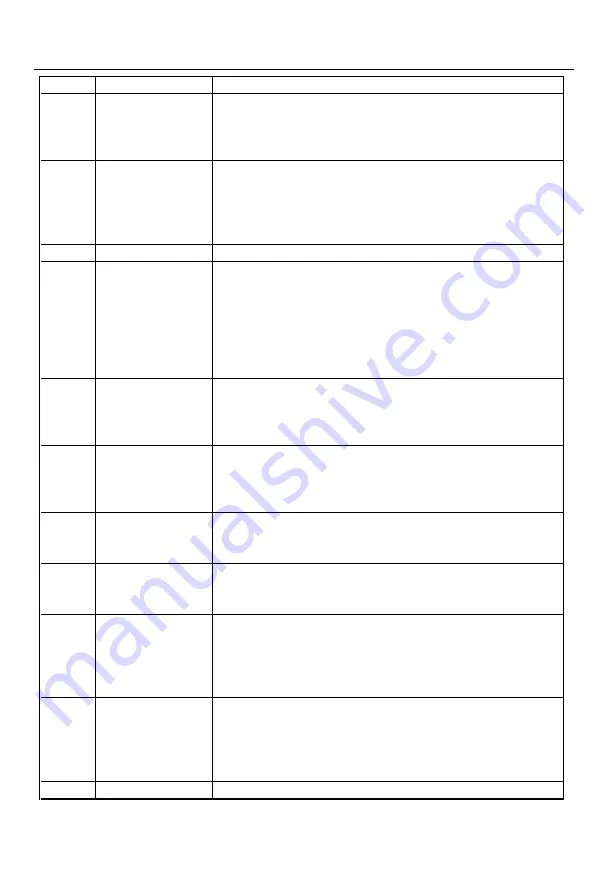
37
Length counter
input (≤250Hz)
This is the pulse input terminal that has a length counting
function, the input pulse frequency is limited to 250Hz or
below, and only one terminal can be set with this function. See
the description of the function codes F16.01 to F16.02.
38
High-speed length
count input
(≤100kHz, only
valid for X5)
This is the pulse input terminal that has a length counting
function, and the input pulse frequency is limited to 100kHz or
below. It is invalid only for the terminal X5 (that is, only
F02.06=38 can be set). See the description of the function
codes F16.01 to F16.02.
39
Length clearing
This length clearing terminal has a length counting function.
40
Pulse input (≤ 100
kHz, only valid for
X5)
This is a pulse signal input terminal, and the input pulse
frequency is limited to 100kHz or below. It is valid only for the
terminal X5.
★:
This is used only to set the equivalent AI percentage
instead of other special functions (e.g. counting). When
F00.04=5, you need to set F02.06=40 and the set frequency
pulse needs to be inputted from the terminal X5.
41
Process PID pause
When this terminal is valid, PID adjustment will be stopped,
and the output of the process PID module will remain
unchanged. For more information, refer to the description of
the function code F09.18.
42
Process PID integral
pause
When this terminal is valid, the PID integral adjustment will be
suspended, but the proportional and differential adjustment of
the PID will be still valid. This function is known as integral
separation. See the F09.20 description.
43
PID parameter
switching
If the digital input terminal (F09.11=1) for PID parameter
switching is valid, PID parameters will be switched. See the
description of the function codes F09.05 to F09.13.
44
PID
positive/negative
switching
When this terminal is valid, the PID positive/negative modes
will be switched. See the description of the function code
F09.04.
45
Stop and DC
braking
When a stop command is triggered and the frequency reaches
the starting frequency (F04.20) for direct braking during stop,
braking will be enabled. The braking time is subject to the
longer of the terminal closing time and stop/DC braking time
(F04.22).
46
DC braking at stop
The stop command is not triggered. When there is a stop
command, and the frequency reaches the starting frequency
(F04.20) for direct braking during stop, braking will be
enabled. The braking time is subject to the longer of the
terminal closing time and stop/DC braking time (F04.22).
47
Immediate DC
The inverter will immediately stop running and be subject to





















































