





























5-407
About the impact detection function
5Functions set with parameters
*Program example
This program moves the robot to a retreat position by interrupt processing if an interference is detected.
10 Def Act 1,M_ColSts(1)=1 GoTo *HOME,S
' Define processing to be executed if an interference is detected
by interruption.
20 Act 1=1
30 COLLVL 80,120,120,100,80,80,,
' Set the detection level.
40 ColChk ON,NOERR
' Enable the impact detection function in the NOERR mode.
50 Mov P1
60 Mov P2
' Jump to the interrupt processing if an interference is detected
while executing step 50 to 80.
70 Mov P3
80 Mov P4
90 ColChk OFF
' Disable the impact detection function.
100 Act 1=0
.
.
1000 *HOME
' Interrupt processing when an interference is detected
1010 ColChk OFF
'Disable the impact detection function.
1020 Servo On
' Turn the servo on.
1030 PESC=P_ColDir(1)*(-5)
' Calculate the retreat amount (reverse operation of approxi-
mately 5 mm).
1040 PDst=P_Fbc(1)+PESC
' Create a retreat position.
1050 Mvs PDst
' Move to the retreat position.
1060 Error 9100
' Pause the operation by generating user-defined L-level error.
.
.
3) Supplement
*Distinction between jog operation and program operation
The robot operation speed and tasks are quite different at jog operation and program operation. The set-
tings for these operations are thus made independently in order to optimize the impact detection function for
each type of operation. Here, the terms "at jog operation" and "at program operation" refer to the following.
At jog operation:
During jog operation or during pause of automatic operation
At program operation:
During automatic operation, during step feed/
return operation or during position data check operation
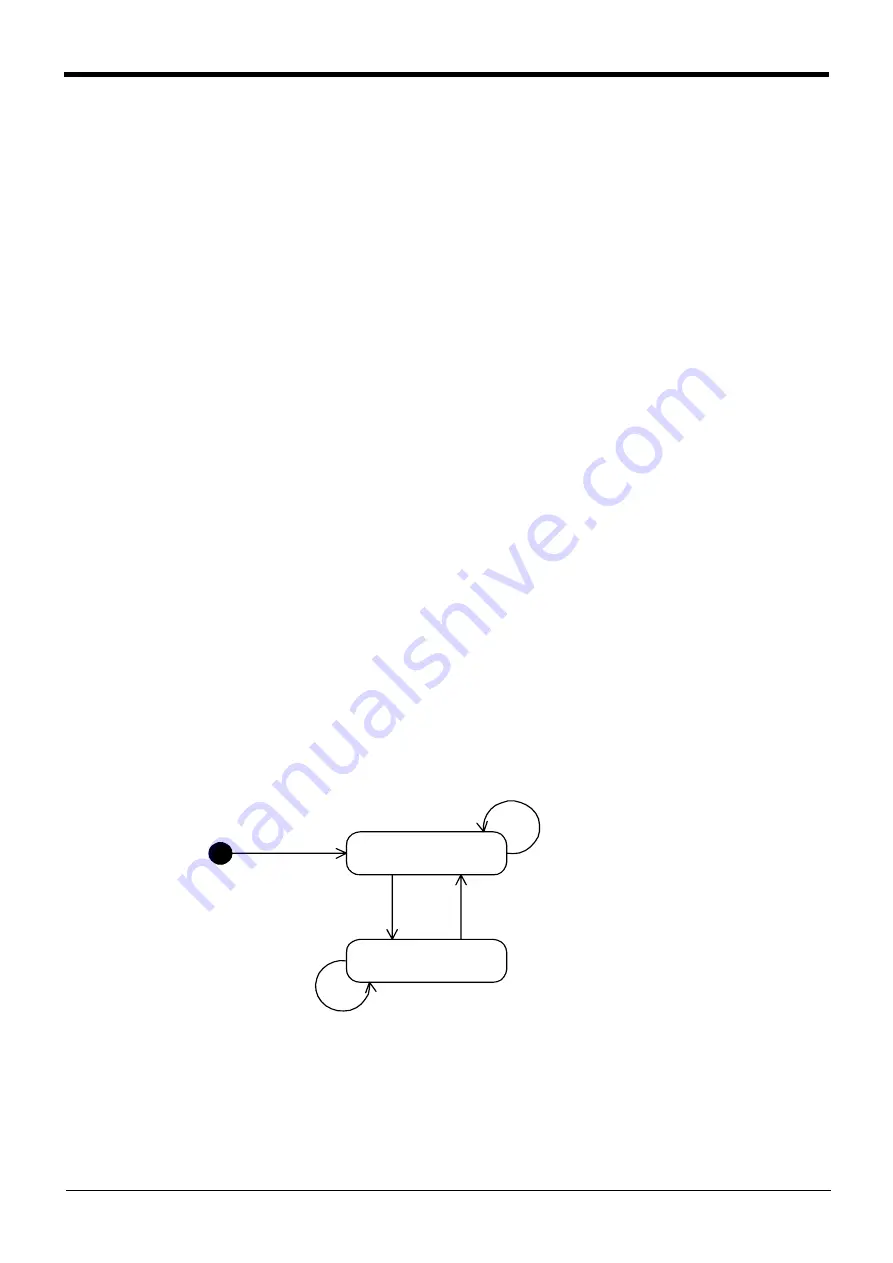
When these operations are executed, the status switches as shown in
.
Fig.5-9:State transition diagram illustrating switch between program operation and jog operation
Thus, if the impact detection function at jog operation is enabled, for example, then even if the impact detec-
tion is set to be disabled in program operation, the setting is switched to that at jog operation if the stop but-
ton is pressed to pause the operation and the impact detection is enabled.
*Impact detection function while servo off
The impact detection function is temporarily disabled while the servo is turned off at both jog operation and
program operation.
Impact detection function
at jog operation
Impact detection function
at program operation
Power on
End of operation
Stop input
H/L level errors occur
During jog operation
During pause of automatic operation
Operation start
Step feed/return
Position data check
During automatic operation
During step feed/return operation
During position data check operation







































































