





























5-399
About singular point passage function
5Functions set with parameters
*How to use the singular point passage function
In order to use the singular point passage function in jog operation, specify 1 (valid) for parameter FSP-
JOGMD and turn the power supply to the controller off and on again. To use the function in automatic oper-
ation, specify 2 for constant 2 in the TYPE specification of the interpolation instruction.
*Limitations
There are the following limitations to the use of the singular point passage function.
(1) The singular point passage function cannot be used if additional axes are used for multiple mecha-
nisms.
(2) The singular point passage function cannot be used if synchronization control is used for additional
axes of a robot.
(3) The singular point passage function cannot be used if the compliance mode is valid.
(4) The singular point passage function cannot be used if the collision detection function is valid.
(5) The information collection level of the maintenance forecast function must be set to level 1 (factory
setting).
(2) Singular point passage function in jog operation
In case of jog operation, the singular point passage function is specified to be valid (1) or invalid (0) by
parameter FSPJOGMD.
1) For robots that cannot use the singular point passage function, changing the setting value of parameter
FSPJOGMD has no effect; the same operation as in the past is performed (the models supporting the
singular point passage function are the RV-3SD/3SDJ/6SD/6SDL/12SD/12SDL/18SD series).
2) It is not possible to specify multiple axes to perform jog operation at the same time when passing a sin-
gular point. If it is attempted to operate an axis while another axis is operating, the operation is ignored.
3) A singular point adjacent alarm is generated if the robot comes near a singular point when performing jog
operation using a T/B. See
Page 379, "5.17 About the singular point adjacent alarm".
4) The specification of parameter FSPJOGMD is reflected in jog operation via dedicated input signals as
well.
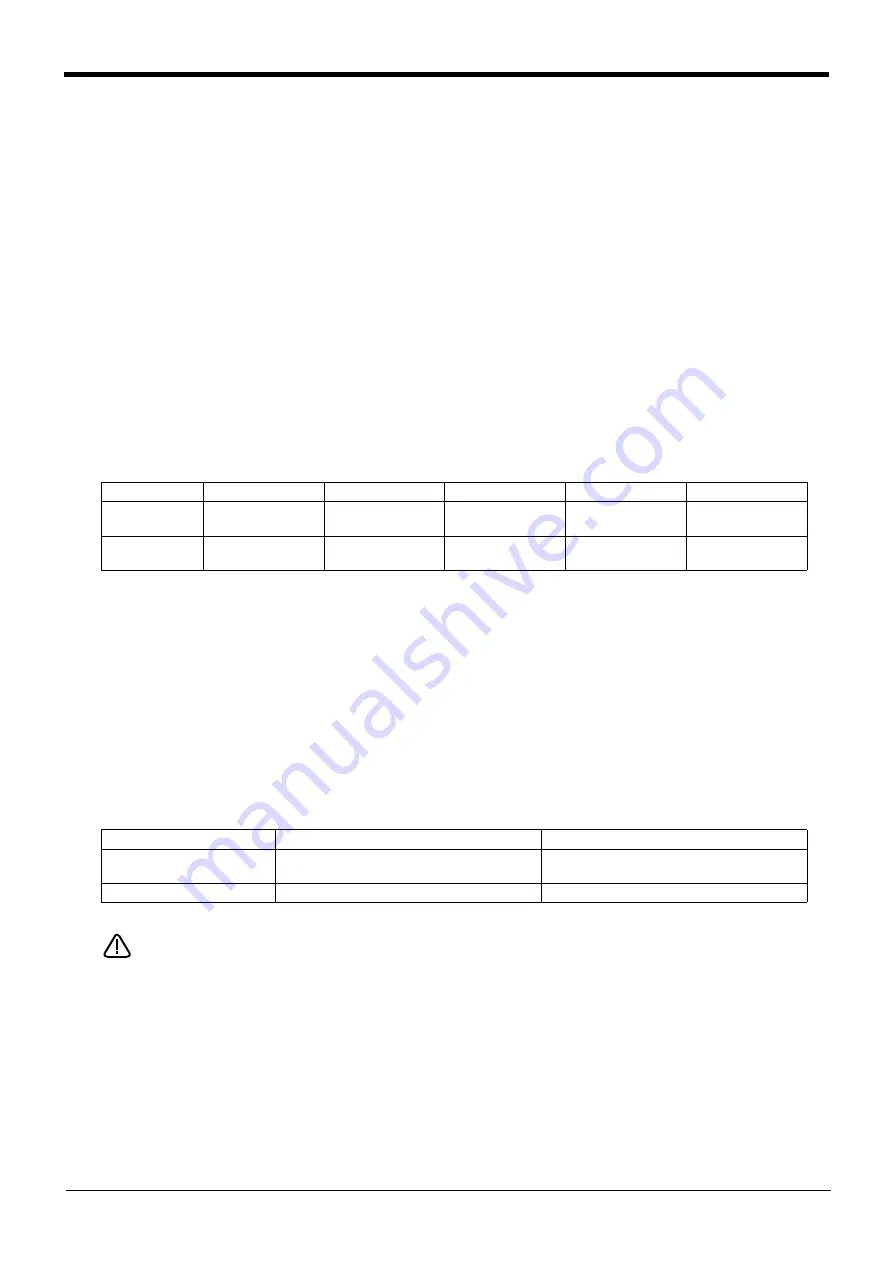
(3) Singular point passage function in position data confirmation (position jump)
The specification of parameter FSPJOGMD is also reflected in position data confirmation (position jump).
If an interpolation instruction (e.g., Mvs P1) is executed directly from T/B when param-
eter FSPJOGMD is set to 1 (valid), the robot operates with the singular point passage
function enabled even if the function is not made valid by the TYPE specification.
FSPJOGMD
XYZ jog
Tool jog
3-axis XYZ jog
CYLINDER jog
JOINT jog
0
(Factory setting)
Same as in the past Same as in the past Same as in the past Same as in the past Same as in the past
1
Singular point pas-
sage XYZ jog
Singular point pas-
sage Tool jog
Same as in the past Same as in the past Same as in the past
FSPJOGMD
MO position movement
MS position movement
0
(Factory setting)
Same as in the past
Same as in the past
1
Same as in the past
Singular point passage position movement
CAUTION







































































