





























4MELFA-BASIC V
MELFA-BASIC V functions
4-92
(4) Continuous movement
The robot continuously moves to multiple movement positions without stopping at each movement position.
The start and end of the continuous movement are designated with the command statement. The speed can
be changed even during continuous movement.
*Command word
*Statement example
*Program example
•Program example
*Related functions
Command word
Explanation
Cnt
Designates the start and end of the continuous movement.
Statement example
Explanation
Cnt 1.................................................................................
Designates the start of the continuous movement.
CNT 1, 100, 200 ...............................................................
Designates the start of the continuous movement, and designates that the start point
neighborhood distance is 100mm, and the end point neighborhood distance is 200mm.
CNT 0 ...............................................................................
Designates the end of the continuous movement.
Program
Explanation
1
Mov P1
'
(1)
Moves with joint interpolation to P1.
2
Cnt 1
' Validates continuous movement. (Following movement is continuous movement.)
3
Mvr P2, P3, P4
'
(2)
Moves linearly to P2, and continuously moves to P4 with arc movement.
4
Mvs P5
' After arc movement, moves linearly to P5.
5
Cnt 1, 200, 100
'
(3)
Sets the continuous movement's start point neighborhood distance to 200mm,
and the end point neighborhood distance to 100mm.
6
Mvs P6
'
(4)
After moving to previous P5, moves in succession linearly to P6.
7
Mvs P1
'
(5)
Continuously moves to P1 with linear movement.
8
Cnt 0
' Invalidates the continuous movement.
9
End
' Ends the program.
Function
Explanation page
Designate the movement speed. ........................................................
Page 93, "(5) Acceleration/deceleration time and speed control"
Designate the acceleration/deceleration time. ...................................
Page 93, "(5) Acceleration/deceleration time and speed control"
Confirm that the target position is reached. .......................................
Page 95, "(6) Confirming that the target position is reached"
Move with joint interpolation................................................................
Page 88, "(1) Joint interpolation movement"
Move linearly. ......................................................................................
Page 89, "(2) Linear interpolation movement"
Move while drawing a circle or arc......................................................
Page 90, "(3) Circular interpolation movement"
*1) Specification of forward/backward
movement of the hand
The statement examples and program
examples are for a vertical 6-axis robot
(e.g., RV-6SD).
The hand advance/
retrace direction relies on the Z axis
direction (+/- direction) of the tool
coordinate set for each model.
Refer to the tool coordinate system
shown in "Confirmation of move-
ment" in the separate "From Robot
unit setup to maintenance", and
designate the correct direction.
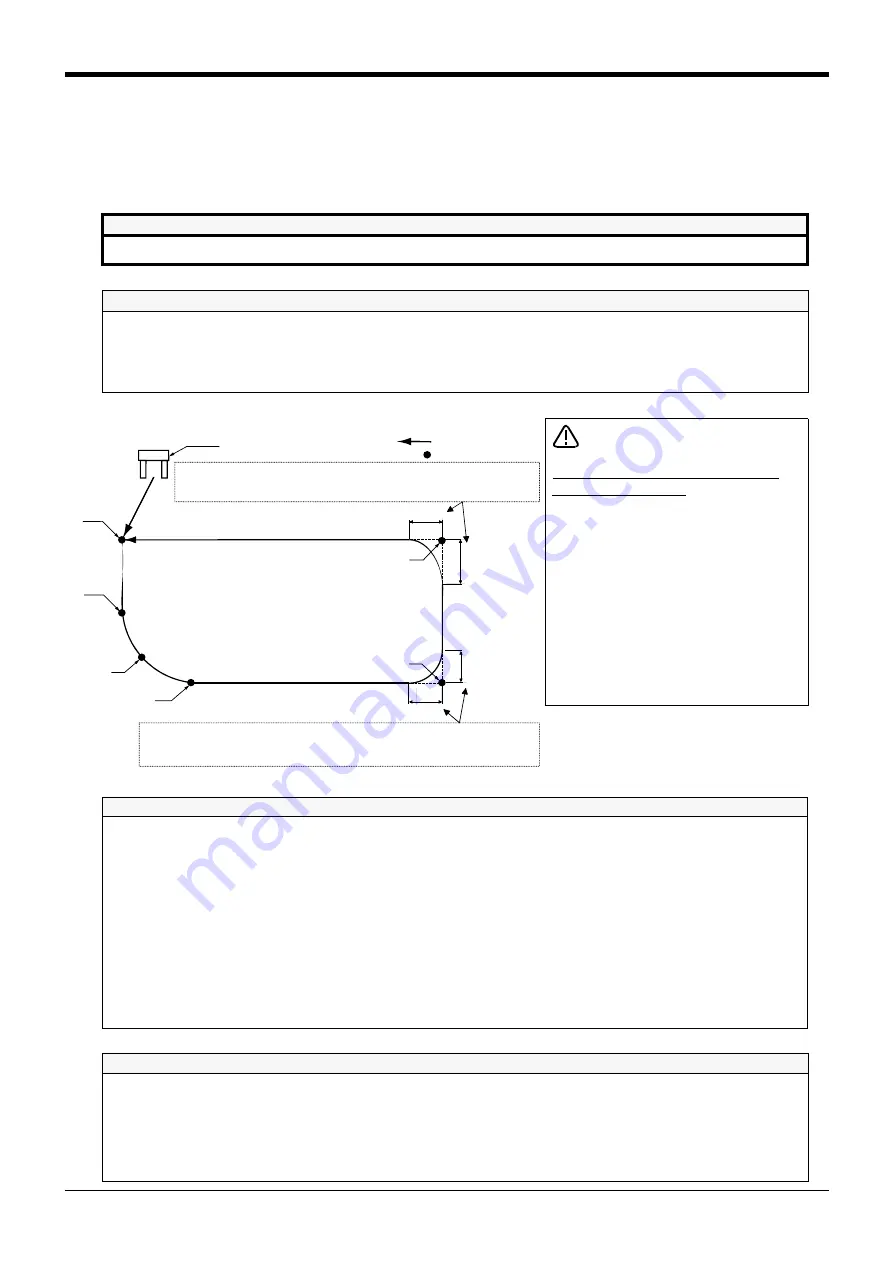
CAUTION
Hand
(1)
(2)
(3)
(4)
(5)
100mm
200
mm
Default value
:Movement position
:Robot movement
P1
P2
P3
P4
P5
P6
10
0mm
The robot moves continuously for less than the smaller distance
of either the proximity distance when moving toward P6 (200 mm)
or the proximity distance to the starting point of the path to P1 (100 mm).
The robot moves continuously for less than the smaller distance of either
the proximity distance when moving toward P5 (default value) or the proximity
distance to the starting point of the path to P6 (200 mm).
Robot movement







































































