





























5Functions set with parameters
About the impact detection function
5-402
5.21 About the impact detection function
(1) Overview of the function
When the robot is operated to perform various tasks, it may interfere with workpieces and peripheral devices
due to operation mistakes of operators, errors in operation programs and so on. Conventionally, in such
cases, the robot would be stopped by protection functions (such as excessive error detection) of servos that
control the motor drive of the robot to prevent damage to the robot hands and arms, workpieces and periph-
eral devices. However, because the robots operate at higher speeds and with larger motors, it becomes dif-
ficult to prevent damage solely by the servo protection functions if the load applied at interference increases.
The impact detection function detects interferences at higher sensitivity than the servo's conventional pro-
tection functions and stops the robot more quickly in order to avoid damage.
Even if the impact detection function is enabled, it is not possible to prevent injury
to operators in case they get hit by moving robots. The prescribed safety rules must
always be observed in all cases, whether the impact detection function is enabled
or disabled.
Even if the impact detection function is enabled, it is not possible to prevent dam-
age to robots, hands and workpieces due to interference with peripheral devices
completely. As a general rule, pay sufficient attention to avoid interference with
peripheral devices when operating and handling robots.
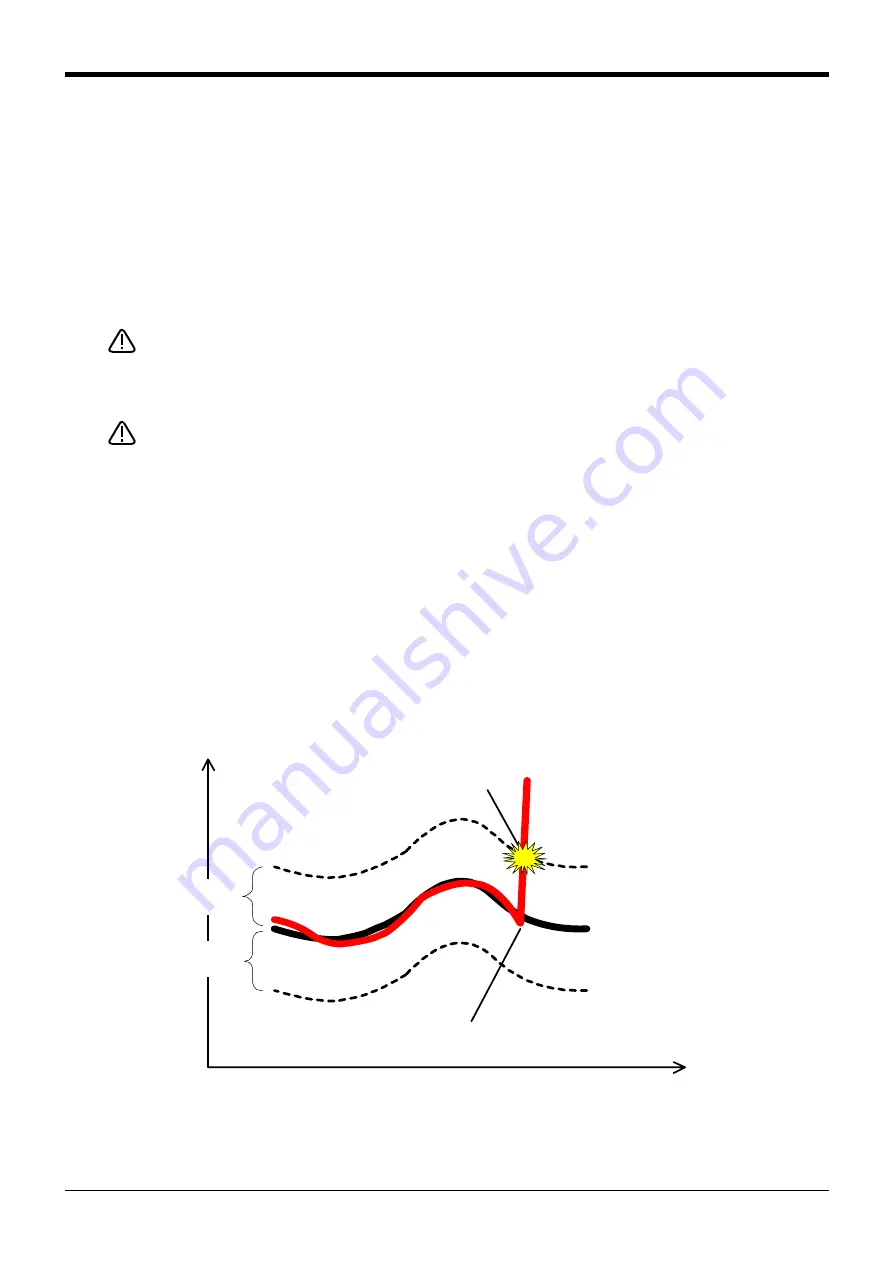
*Interference detection principle
If a robot interferes with peripheral devices, the actual position does not follow the position instruction of
each joint axis and greater torque is generated due to the feedback control of a servo. Unless the interfer-
ence is ended, the generated torque will increase further and become much larger than when there is no
interference.
The impact detection function detects interferences using such servo characteristics. First, the torque
required for each joint axis is estimated based on the current position instruction and load setting. Next, the
values are compared with the actually generated torques for each axis one by one. If the difference exceeds
the allowable range (detection level), the function judges that an interference occurred. It immediately turns
the servo off and stops the robot.
Fig.5-8:Interference detection principle
WARNING
CAUTION
Estimated torque
Actual torque
Torque
Time
Detect interference
Interference occurs
Allowable range + side
(detection level + side)
Allowable range - side
(detection level - side)







































































