





























6External input/output functions
Types
6-408
6 External input/output functions
6.1 Types
(1) Dedicated input/output.................... These are I/O signals that indicate the status of remote commands such as
robot program execution and stoppage, information during execution and the
servo power status and so on.
Assign functions to each I/O signal.
Functions can be assigned either by
setting used signal numbers to each dedicated parameter (Refer to
416, "6.3 Dedicated input/output"
.) or by an emergency stop output (Refer
(2) General-purpose input/output ...... These signals are used for communication with the sequencer and so at the
robot program. This is used at such times as when reading positioning signals
from peripheral equipment and when checking the robot position.
(3) Hand input/output .............................. These are control signals for the hand and are used for reading hand open
and close instructions and information from sensors attached to the hand.
These signals can be controlled at the user program and are wired up to near
the tip of the hand. (Hand output signals are optional.)
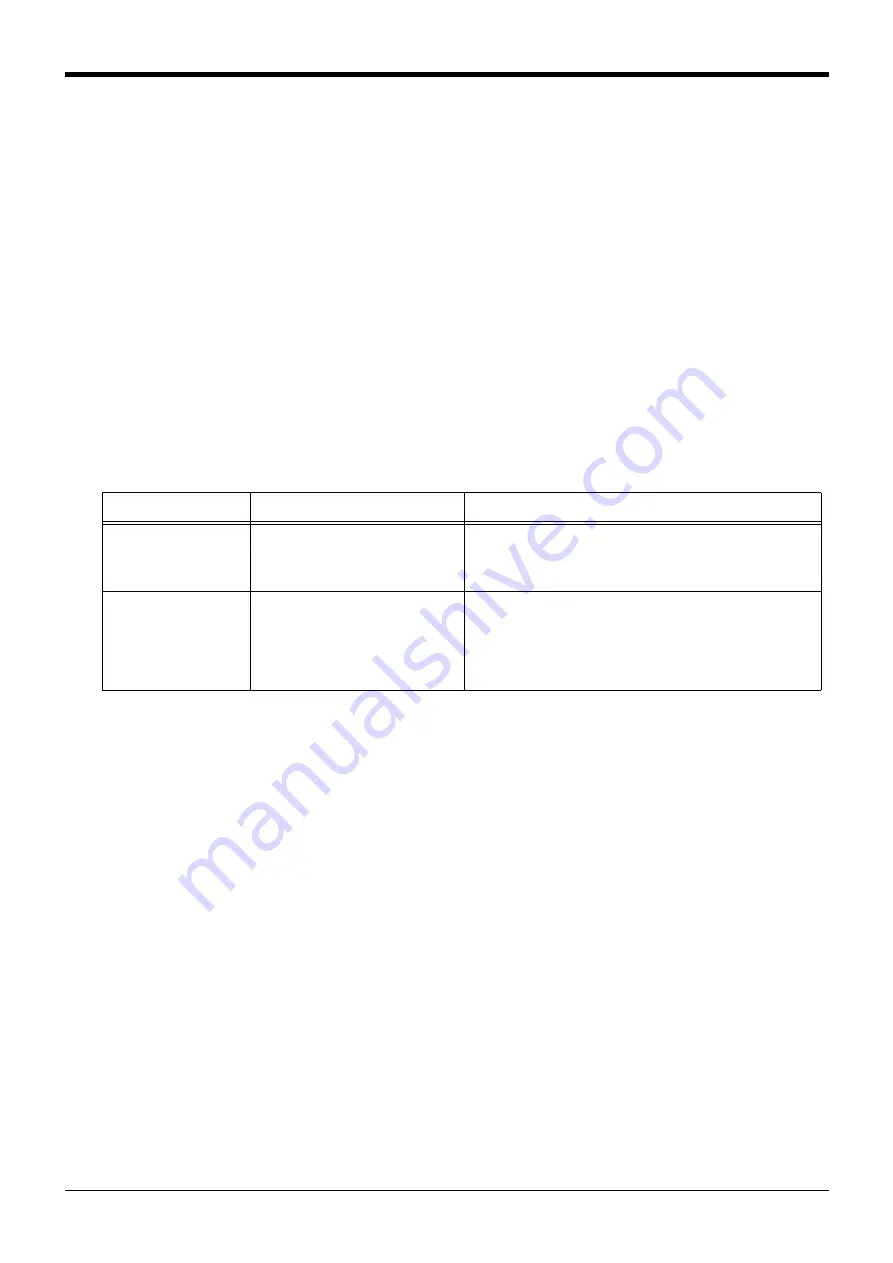
Table 6-1:Overall I/O signal map
Item
I/O signal no.
Usage method
Hand input/output
9 0 0 ~ 9 0 7
Reference/substitution with M_In, M_Inb, M_Inw, M_Out, M_Outb,
M_Outw variables
Also possible with HOpen, HClose commands.
Example) If M_In(900) Then M_Out(900) = 1
Sequencer link
input/
output
10000 ~ 18191
Reference/substitution with M_In, M_Inb, M_Inw, M_Out, M_Outb,
M_Outw variables
Example) If M_In(10080)=1 Then M_Out(10080) = 1
Note: It is not possible to output using M_Out, M_Outb, or M_Outw
variables for signals to which dedicated outputs have been
assigned.







































































