





























4-97
MELFA-BASIC V functions
4MELFA-BASIC V
(8) Hand and tool control
The hand open/close state and tool shape can be designated.
*Command word
*Statement example
*Program example
•Program example
*Related functions
Command word
Explanation
HOpen
Opens the designated hand.
HClose
Closes the designated hand.
Tool
Sets the shape of the tool being used, and sets the control point.
Statement example
Explanation
HOpen 1 ...........................................................................
Opens hand 1.
HOpen 2 ...........................................................................
Opens hand 2.
HClose 1...........................................................................
Closes hand 1.
HClose 2...........................................................................
Closes hand 2.
Tool (0, 0, 95, 0, 0, 0) .......................................................
Sets the robot control point to the position 95 mm from the flange plane in the extension
direction.
Program
Explanation
1
Tool(0, 0, 95, 0, 0, 0)
’Sets the hand length to 95 mm.
2
Mvs P1, -50 *1)
’
(1)
Moves with joint interpolation from P1 to position retracted 50mm in hand direction.
3
Ovrd 50
’Sets the movement speed to half of the maximum speed.
4
Mvs P1
’
(2)
Moves with linear interpolation to P1. (Goes to grasp workpiece.)
5
Dly 0.5
’ Wait for the 0.5 seconds for the completion of arrival to the target position.
6
HClose 1
’
(3)
Closes hand 1. (Grasps workpiece.)
7
Dly 0.5
’Waits 0.5 seconds.
8
Ovrd 100
’Sets movement speed to maximum speed.
9
Mvs , -50 *1)
’
(4)
Moves linearly from current position (P1) to position retracted 50mm in hand direction. (Lifts up
workpiece.)
10
Mvs P2, -50 *1)
’
(5)
Moves with joint interpolation from P2 to position retracted 50mm in hand direction.
11
Ovrd 50
’Sets movement speed to half of the maximum speed.
12
Mvs P2
’
(6)
Moves with linear interpolation to P2. (Goes to place workpiece.)
13
Dly 0.5
’ Wait for the 0.5 seconds for the completion of arrival to the target position.
14
HOpen 1
’
(7)
Opens hand 1. (Releases workpiece.)
15
Dly 0.5
’Waits 0.5 seconds.
16
Ovrd 100
’
Sets movement speed to maximum speed.
17
MVS , -50 *1)
’
(8)
Moves linearly from current position (P2) to position retracted 50mm in hand direction.
(Separates from workpiece.)
18
End
’Ends the program.
Function
Explanation page
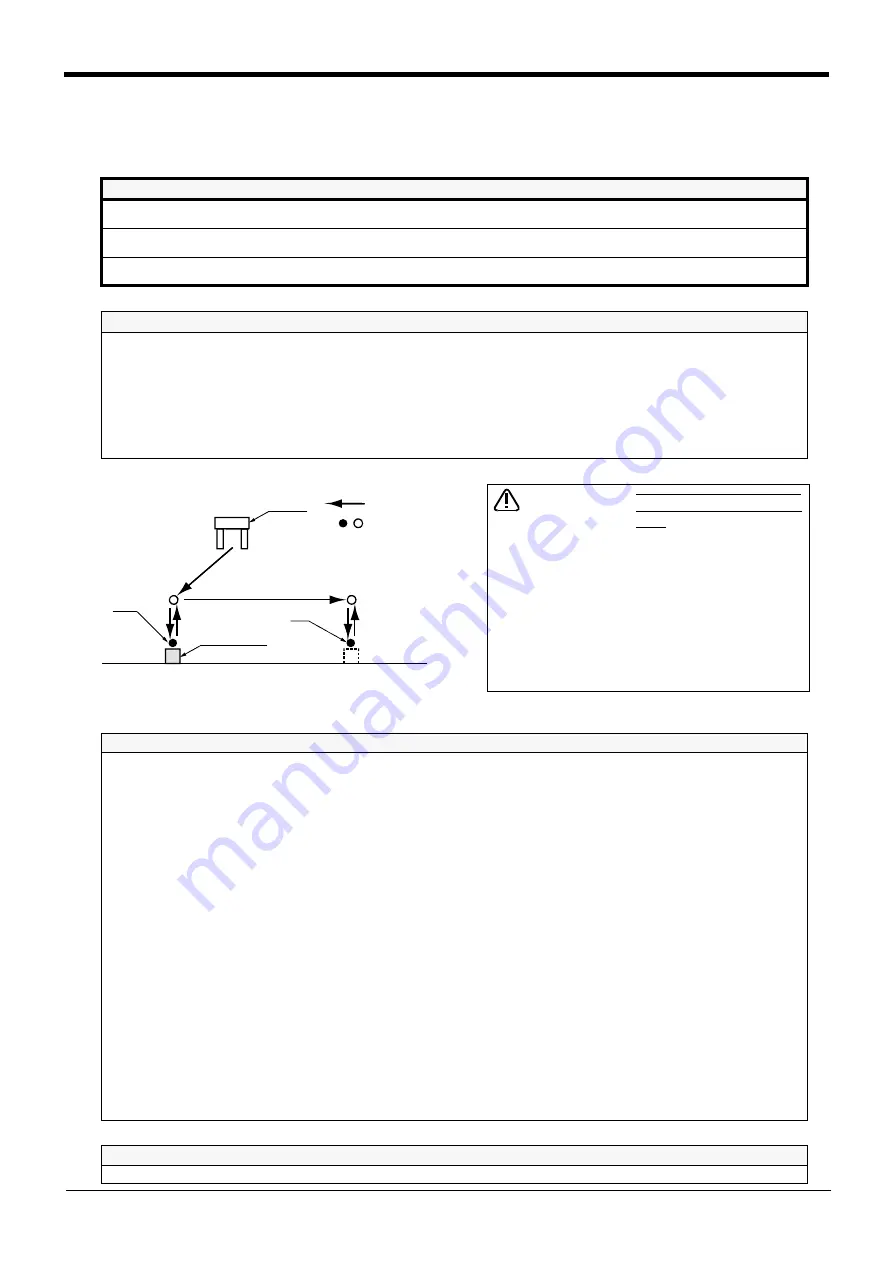
Appended statement .......................................................................................
(1)
(2)
(4)
(3) Grasps
workpiece
(5)
(6)
(8)
(7) Releases
workpiece
P2
Hand
Workpiece
P1
:Movement position
:Robot movement
*1) Specification of forward/
backward movement of the
hand
The statement examples and program examples
are for a vertical 6-axis robot (e.g., RV-6SD).
The
hand advance/retrace direction relies on the
Z axis direction (+/- direction) of the tool coor-
dinate set for each model.
Refer to the tool coordinate system shown in
"Confirmation of movement" in the separate
"From Robot unit setup to maintenance", and
designate the correct direction.
CAUTION
Robot movement







































































