





























Parameters 221
Defines the integration time for the process PID controller.
This time needs to be set to the same order of magnitude as
the reaction time of the process being controlled, otherwise
instability will result.
Note:
Setting this value to 0 disables the “I” part, turning the
PID controller into a PD controller.
10.0 s
0.0…9999.0 s
Integration time.
1 = 1 s
Defines the derivation time of the process PID controller. The
derivative component at the controller output is calculated on
basis of two consecutive error values (E
K-1
and E
K
) according
to the following formula:
PID DERIV TIME × (E
K
- E
K-1
)/
T
S
, in which
T
S
= 2 ms sample time
E = Error = Process reference - process feedback.
0.000 s
0.000…10.000 s
Derivation time.
1000 = 1 s
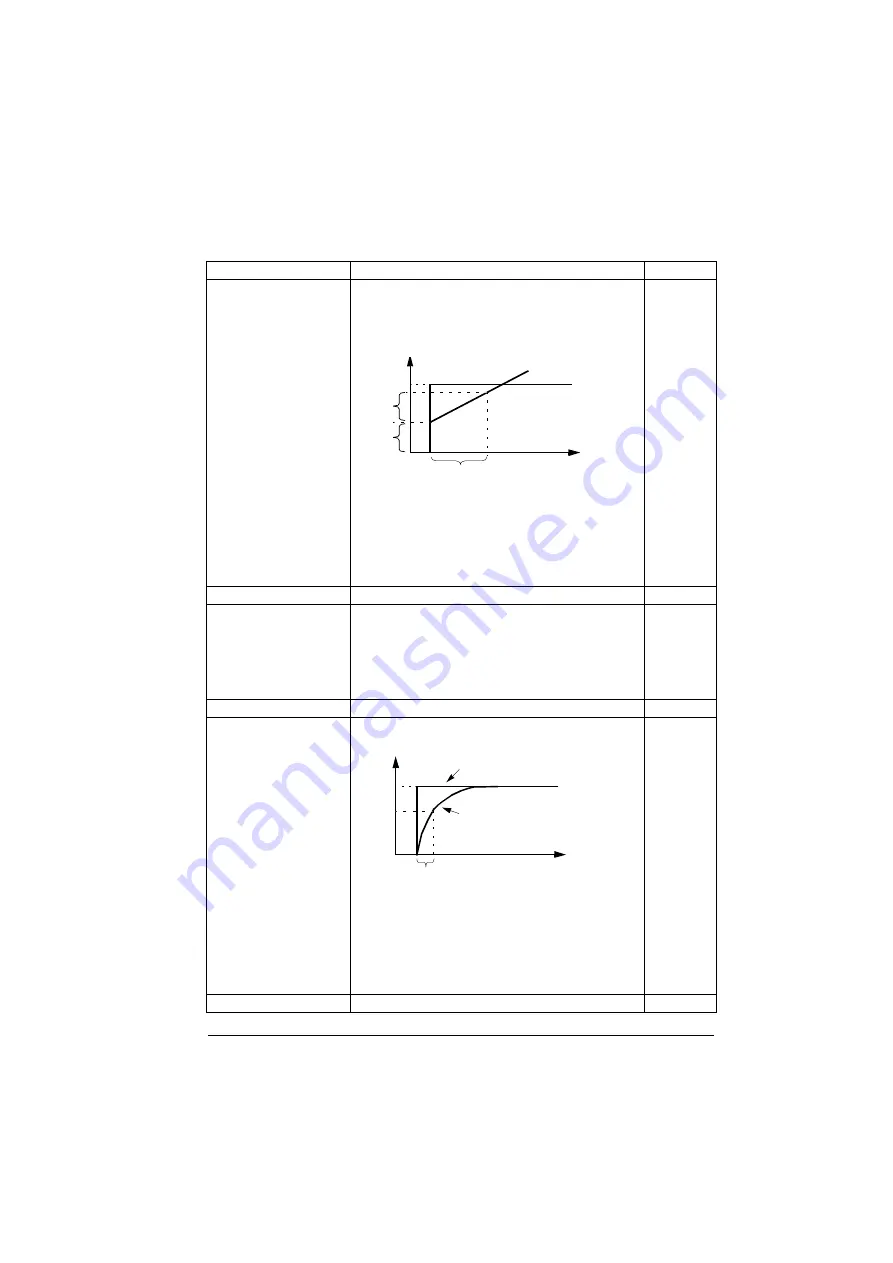
Defines the time constant of the 1-pole filter used to smooth
the derivative component of the process PID controller.
0.0 s
0.0…10.0 s
Filter time constant.
10 = 1 s
No.
Name/Value
Description
Def/FbEq16
Ti
O
I
G × I
G × I
I = controller input (error)
O = controller output
G = gain
Ti = integration time
Time
Error/Controller output
63
%
100
T
t
O = I × (1 - e
-t
/T
)
I = filter input (step)
O = filter output
t
= time
T = filter time constant
Unfiltered signal
Filtered signal
Содержание ACQ580
Страница 1: ...ABB drives for water Firmware manual ACQ580 pump control program ...
Страница 4: ... 2017 ABB Oy All Rights Reserved 3AXD50000035867 Rev C EN EFFECTIVE 2017 06 21 ...
Страница 29: ...Start up control with I O and ID run 25 After the ID run is completed text Done is shown on row ID run ...
Страница 30: ...26 Start up control with I O and ID run ...
Страница 40: ...36 Default configuration ...
Страница 304: ...300 Parameters ...
Страница 340: ...336 Additional parameter data ...
Страница 422: ...Contact us www abb com drives www abb com drivespartners 3AXD50000035867 Rev C EN 2017 06 21 3AXD50000035867C ...







































































