





























Tx
Rx
CAN Core
•
•
DCAN
CAN_RX
CAN_TX
Functional Description
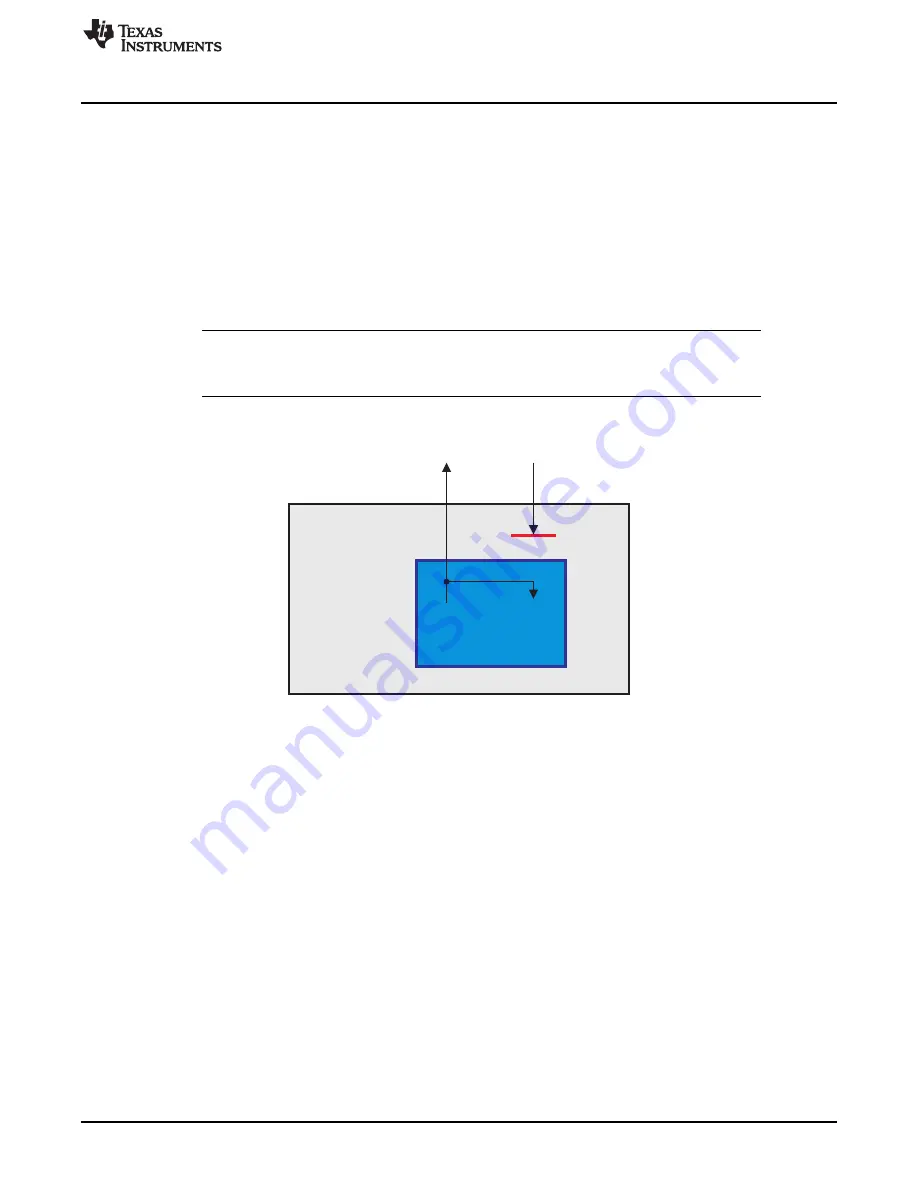
23.3.8.3.2 Loopback Mode
The loopback mode is mainly intended for hardware self-test functions. In this mode, the CAN core uses
internal feedback from Tx output to Rx input. Transmitted messages are treated as received messages,
and can be stored into message objects if they pass acceptance filtering. The actual value of the CAN_RX
input pin is disregarded by the CAN core. Transmitted messages can still be monitored at the CAN_TX
pin.
In order to be independent from external stimulation, the CAN core ignores acknowledge sampled in the
acknowledge slot of a data/remote frame.
shows the connection of signals CAN_TX and CAN_RX to the CAN core in loopback mode.
Loopback mode can be activated by setting bit LBack in the test register to one.
NOTE:
In loopback mode, the signal path from CAN core to Tx pin, the Tx pin itself, and the signal
path from Tx pin back to CAN core are disregarded. For including these into the testing, see
Figure 23-6. CAN Core in Loopback Mode
3891
SPRUH73H – October 2011 – Revised April 2013
Controller Area Network (CAN)
Copyright © 2011–2013, Texas Instruments Incorporated







































































