





























SRV-63 series AC servo drives Faults and solutions
-242-
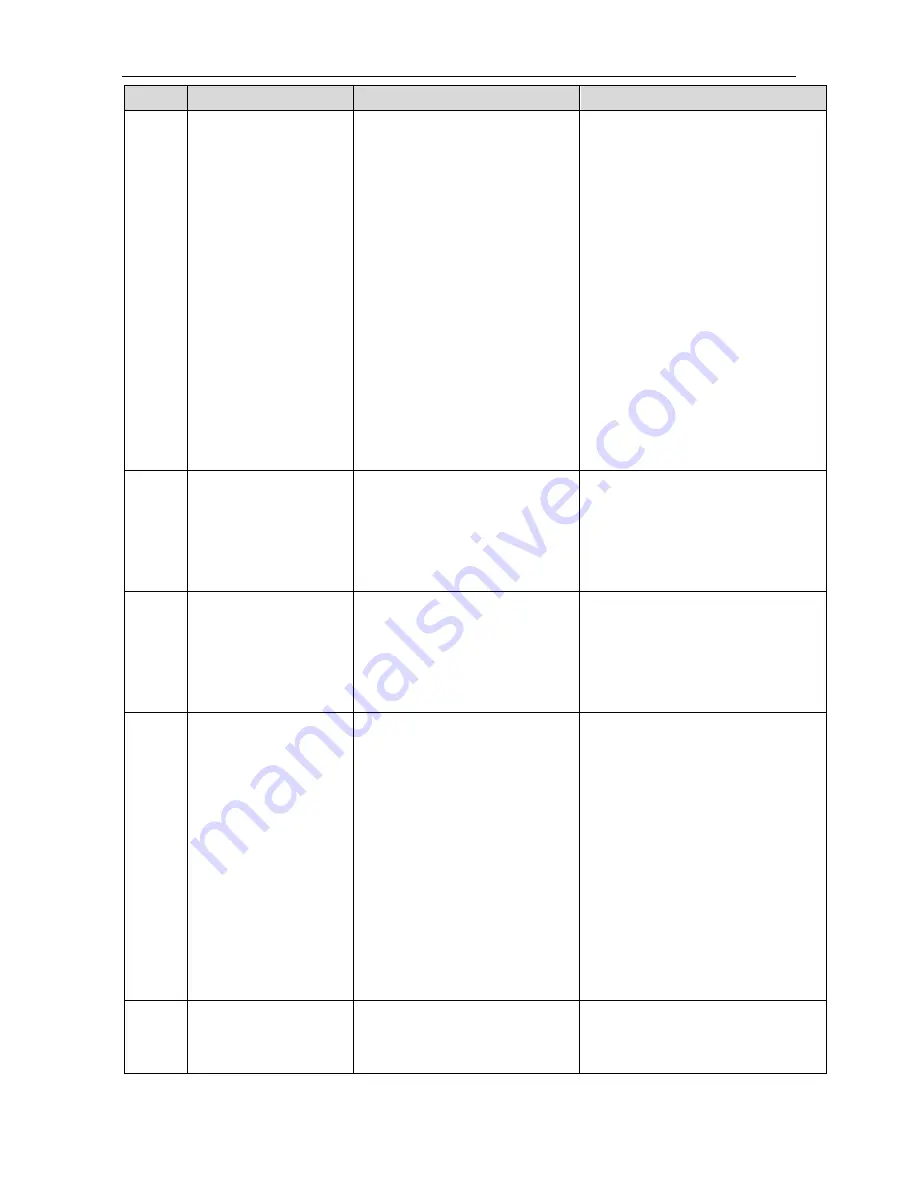
Code
Name
Causes
Countermeasures
Er20-0
Speed deviation fault
In non-torque mode, the deviation
between motor speed and speed
command exceeds the set value
of P4.39
1. U, V, W phases of the motor
are connected reversely or motor
cable is not connected.
2. The motor load is so heavy that
it causes motor stall
3. Insufficient drive force that
causes motor stall
4. Speed loop control parameters
setting is improper
5. The set value of P4.39 is too
small.
1. Check the phase sequence of
motor cable and ensure right wiring;
2. Check whether the conveyer belt
or chain or the workbench reaches
the boundary or encounters
obstacles;
3. Check whether the loop control
parameters are set correctly or the
drive is damaged or servo system
model is proper;
4. Enlarge the setting value of P4.39
5. Set P4.39 to 0 to disable speed
deviation fault detection.
Er21-0
Position overtravel-FWD
overtravel
Under position mode or
fully-closed loop mode, the FWD
limit switch is touched or the
accumulated feedback pulse
exceeds P0.35.
1.Check whether FWD limit switch
signal is correct;
2.Check whether P0.35 is set
properly.
Er21-1
Position overtravel-REV
overtravel
Under position mode or
fully-closed loop mode, the FWD
limit switch is touched or the
accumulated feedback pulse
exceeds P0.36.
1.Check whether REV limit switch
signal is correct;
2.Check whether P0.36 is set
properly.
Er22-0
Hybrid control deviation
is too large
1. Server response time is too
slow, causing retention pulse
number to exceed the setting
value of P4.33;
2. The motor load is too heavy to
cause motor stall;
3.The pulse input frequency is too
high and exceeds the max. speed
of motor;
4. Position command input step
change exceeds the setting value
of P4.33.
1. Check whether the conveyer belt
or chain or the workbench reaches
the boundary or encounters
obstacles;
2. Enlarge the position loop gain
parameters or speed feedforward
gain or P4.33;
3. Adjust the electronic gear ratio
parameter;
4. Decrease the variation of position
command input.
Er22-1
Position increment
overflow fault
In fully-closed loop control, the
deviation between the feedback
position of
linear encoder
and that
1.Check the connection between the
motor and load;
2. Check the connection between







































































