





























SRV-63 series AC servo drives Commissoning
-207-
The adjustment needs to be carried out to the actual situation:
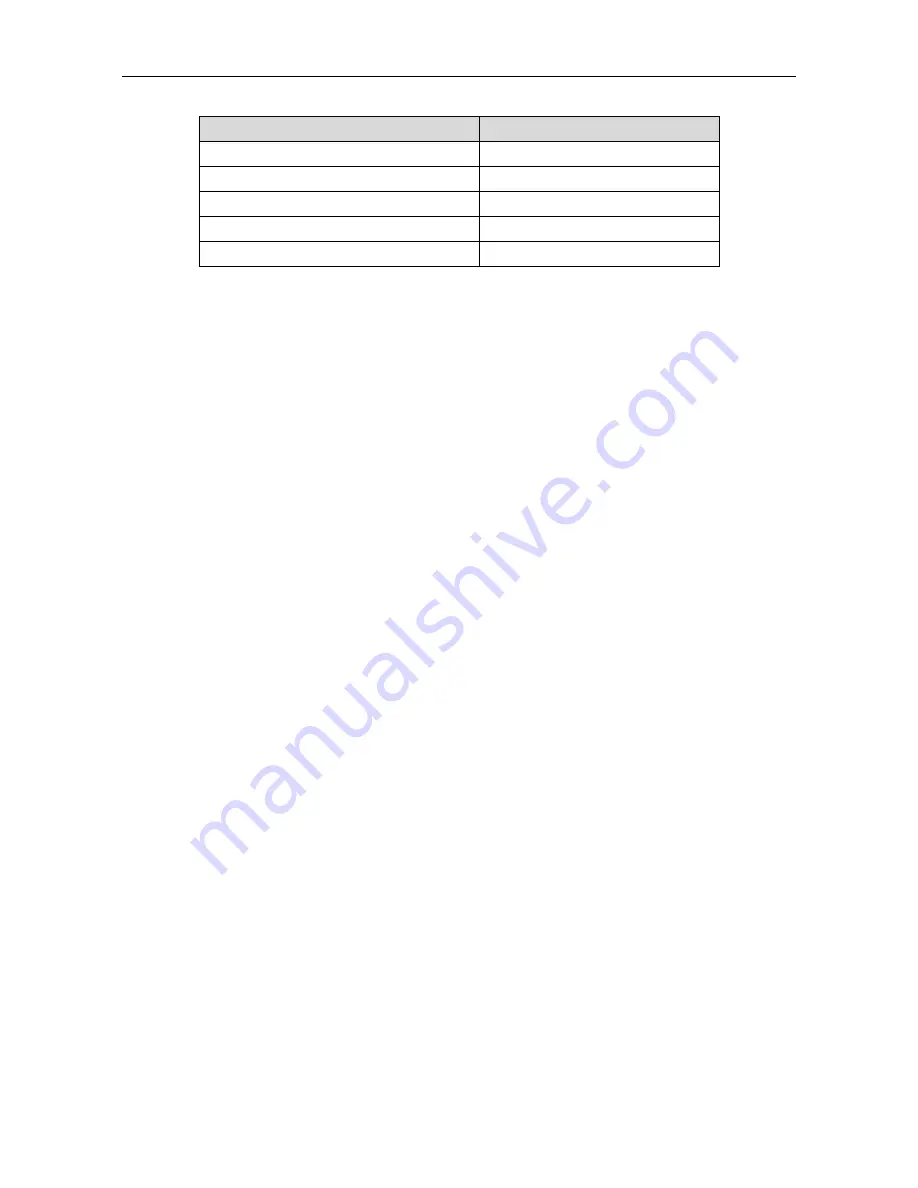
Mechanical structure
Rigidity set
Big handling, transmission equipment
0~13
Belt drive mechanism
5~16
Ball screw + Belt drive
5~16
Manipulator
15~22
Direct ball screw or rigid bodies
18~25
The bigger the set value, the faster the system response, however, noise and vibration may come
along. Please make corresponding setting according to the action of mechanical device.
2. Manual adjustment. If the servo system has vibration or the control performance is not good,
adjusting the parameters of speed loop and position loop to improve system performance or remove
vibration.
Gain of the speed loop: mainly used to determine the response speed of the speed loop. Under the
precondition the mechanical system does not vibrate, the larger the set value, the faster the response
speed.
Speed loop integration time constant: the speed loop has an integrator which can reflect minor input.
This integrator can delay the operation of the servo system. Therefore, when time constant increases,
the response becomes slower, and the required positioning setting time is longer. When the load
inertia is large or the mechanical system is likely to vibrate, the loop integration time parameter must
be large enough to avoid the vibration of the mechanical system.
Torque command filter: in some cases the mechanical system may resonate, generating vibration
noise in sharp tone. At this time filtering via notch filter must be performed to eliminate resonance.
Gain of the position loop: the response of the servo system is determined by the gain of the position
loop. When the gain of the position loop is set to a high value, the response speed will increase and
the time required for positioning will be shortened. If you want to set the gain of the position loop to a
high value, the rigidity and natural frequency of the mechanical system must be very high.
Generally, the gain of the speed loop should be larger than the gain of the position loop whenever
possible. When the position gain is much larger than the speed gain, the system may overshoot
under the action of the step signal, which will seriously damage the system performance. Parameters
of the system always mutually limit each other. If the gain of the position loop increases only, the
command outputted by the position loop may become unstable. This may cause the reaction of the
servo system to become unstable. In general cases, we can adjust the system by referring to the
follow procedures:
1) First set the gain of the position loop to a low value, then, under the precondition that abnormal
sound and vibration are not generated, gradually increase the gain of the speed loop to the maximum.
2) Gradually decrease the gain of the speed loop while increasing the gain of the position loop. Under
the precondition that the whole response is free from overshoot and vibration, set the gain of the
position loop to the maximum.







































































