





























SRV-63 series AC servo drives Detailed parameter description
-149-
time or the time from the finishing of one displacement to the starting of next displacement.
P5.04
Data size
16bit
Data format
DEC
Modbus address
2008,2009
CANopen address
0x2504,0x00
P5.05
JOG cycle times
Setting range
Default
Unit
Available mode
0~10000
1
-
P
This parameter is used to set the JOG cycle times. Please refer to P5.00.
P5.05
Data size
16bit
Data format
DEC
Modbus address
2010,2011
CANopen address
0x2505,0x00
6.6.2 Homing
P5.10
2
Homing mode
Setting range
Default
Unit
Available mode
0~128
0
-
P
F
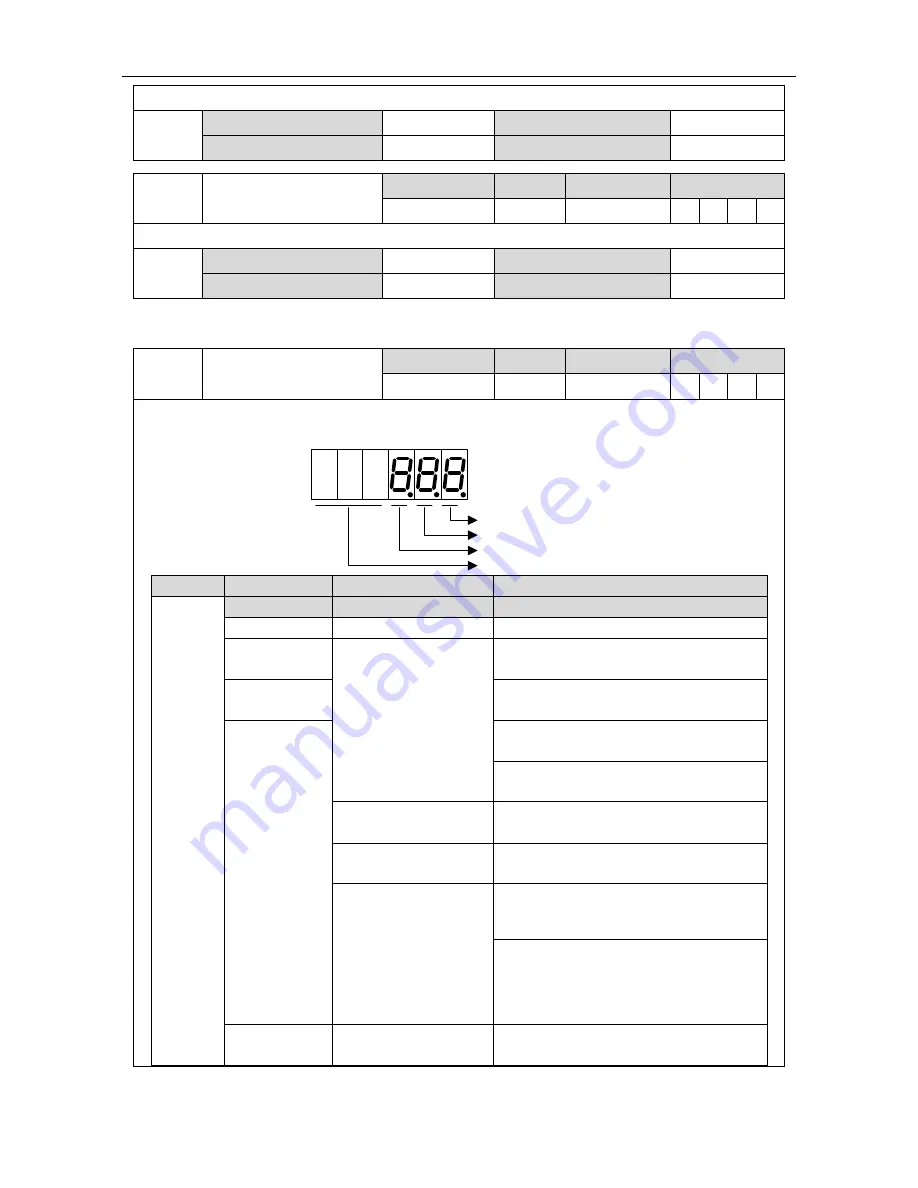
This parameter is used to set the homing mode.
Display mode: DEC
M: Homing mode
Z: Finding Z mode
T: Limit mode
R: Reserved
R
T
Z
M
Reserved
Limit mode
Finding Z mode
Homing mode
0-1
0-2
0-8
T: Invalid
Z=0: define the point of
finding Z as the home;
Z=1 define the point of
finding Z as the home;
Z=2: not finding Z,
define the returning
point as the home
M=0: forward rotation, the forward limit
switch is the returning point
T: Invalid
M=1:reverse rotation, the reverse limit
switch is the returning point
To the limit:
T=0: report the
exceeding fault
T=1: direction
reverse
M=2: forward rotation, the rising edge of
the home switch is the returning point
M=3:reverse rotation, the rising edge of
the home switch is the returning point
Z: Invalid
M=4: forward rotation, the first Z signal is
the returning point
Z: Invalid
M=5: reverse rotation, the first Z signal is
the returning point
define the point of
finding Z as the home;
Z=1 define the point of
finding Z as the home;
Z=2: not finding Z,
define the returning
point as the home
M=6: forward rotation, the declining edge
of the home switch is the returning point
M=7: reverse rotation, the declining edge
of the home switch is the returning point
T: Invalid
M=8: the current position is defined as
the home.







































































