





























44
Operation Theory
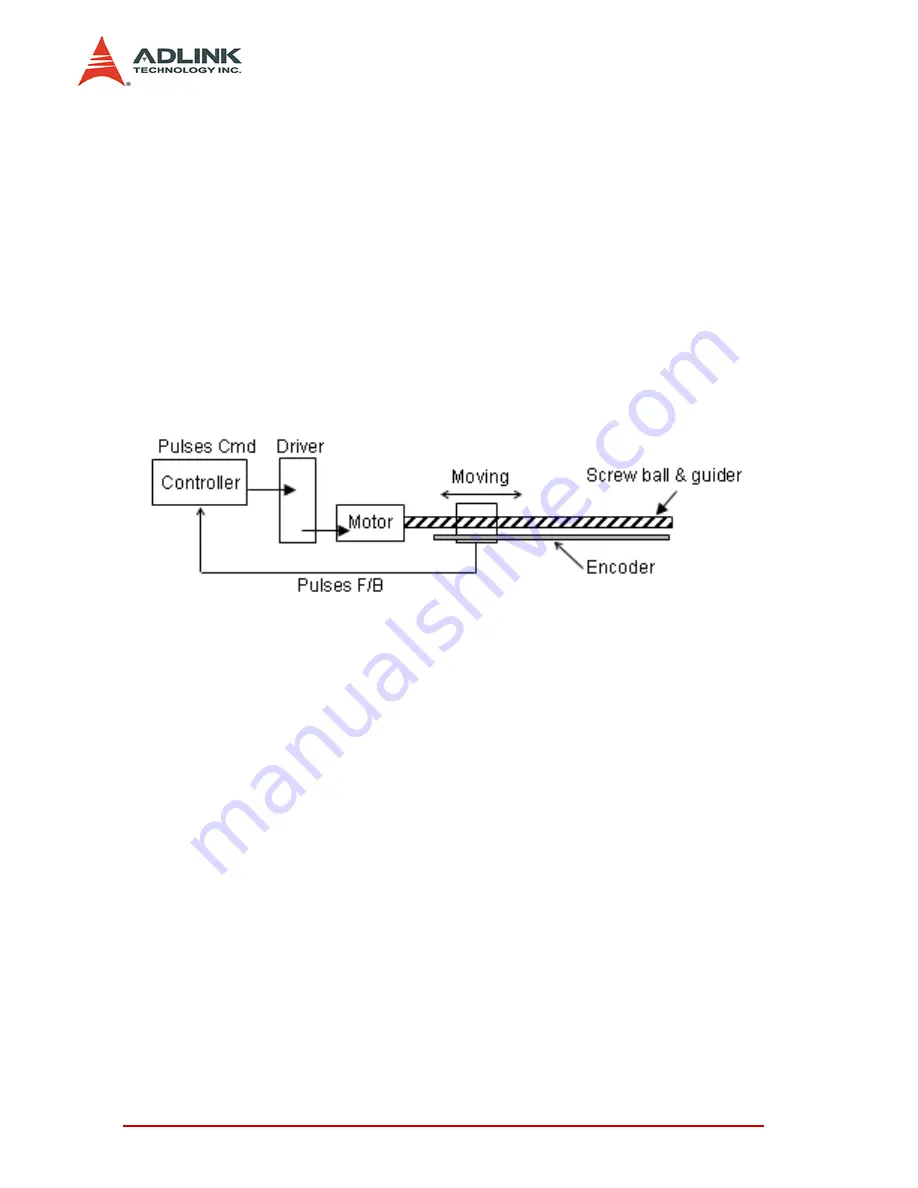
Occasionally, users will need to install a linear scale or an external
encoder to check the machine’s position. If the resolution of an
external encoder is 10,000 pulses per 1mm and the motor will
move 1mm if the motion controller sends 1,000 pulses, then if we
want to move 1 mm, we need to send 1,000 pulses to the motor
driver in order to get the encoder feedback value of 10,000 pulses.
If we want to use an absolute command to move a motor to 10,000
pulses and the current position read from encoder is 3500 pulses,
how many pulses will it send to motor driver? The answer is
(10000 – 3500 ) / (10,000 / 1,000)=650 pulses. The motion con-
troller will calculate this automatically when “move ratio” is set.
The “move ratio” means the (feedback resolution/command reso-
lution).
4.2.2
Absolute and relative position move
In the coordinate system, we have two kinds of commands for
users to locate the target position. One is absolute and the other is
relative. Absolute command means that the user gives the motion
controller a position, then the motion controller will move a motor
to that position from the current position. Relative command
means the user gives the motion controller a distance, then the
motion controller will move the motor the distance from current
position. During the movement, users can specify the speed pro-
file. It means user can define how fast and at what speed to reach
the position.
Summary of Contents for cPCI-8168
Page 4: ......
Page 10: ...vi List of Figures...
Page 29: ...Installation 19 2 9 Overview of CN3 CN6...
Page 31: ...Installation 21 2 11 Switch Setting...
Page 204: ...194 Function Library...







































































