





























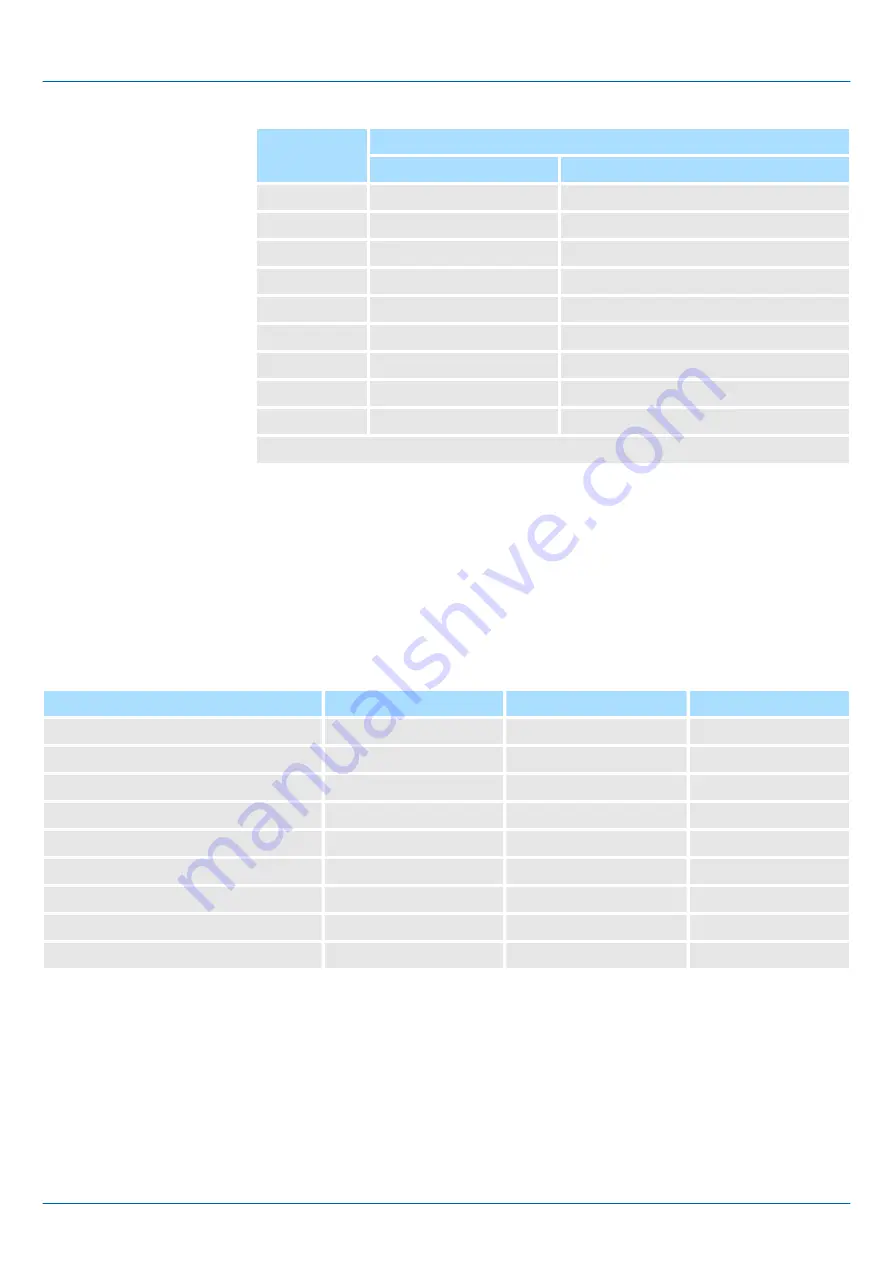
Code*
Velocity (in ms) / channel at interference frequency suppression
50Hz
60Hz
00h*
324.1
270.5
01h*
164.2
137.2
02h*
84.2
70.5
03h
44.1
37.2
04h
24.2
20.5
05h
14.2
12.2
06h
9.2
8.0
07h
6.6
5.9
08h
4.2
3.8
*) For Code 00h, 01h and 02h the tolerances of the technical data "with interference frequency suppression" are valid.
For each channel an
upper
and a
lower limit
may be defined. Here only values of the
nominal range may be preset, otherwise you receive a parameterization error. By preset-
ting 7FFFh for the upper respectively 8000h for the lower limit value the corresponding
limit is deactivated.
As soon as the measuring value is beyond the limits and the limit value monitoring is acti-
vated, a process interrupt is initialized.
3.9.3 Diagnostics and interrupt
Event
Process interrupt
Diagnostics interrupt
parameterizable
Error in project engineering/param.
-
X
-
Wire break
-
X
X
Measuring range overflow
-
X
-
Measuring range underflow
-
X
-
Limit overflow
X
-
X
Limit underflow
X
-
X
Diagnostic buffer overflow
-
X
-
Communication error
-
X
-
Process interrupt lost
-
X
-
So you may react to asynchronous events, there is the possibility to activate a process
interrupt. A process interrupt interrupts the linear program sequence and jumps
depending on the master system to a corresponding Interrupt routine. Here you can react
to the process interrupt accordingly.
With CANopen the process interrupt data a transferred via an emergency telegram.
Operating with CPU, PROFIBUS and PROFINET the process interrupt data were trans-
ferred via diagnostics telegram.
SX - Subindex for access via EtherCAT with Index 5000h
CHxUL CHxLL Upper limit
value Lower limit value
channel x
Process interrupt
VIPA System SLIO
Analog Input
031-1BB90 - AI 2x16Bit TC > Diagnostics and interrupt
HB300 | SM-AIO | | en | 17-05
104