





























107
SPX advanced – description of parameters
SPX ADVANCED APPLICATION MANUAL
SVCH0203—October 2017 www.eaton.com
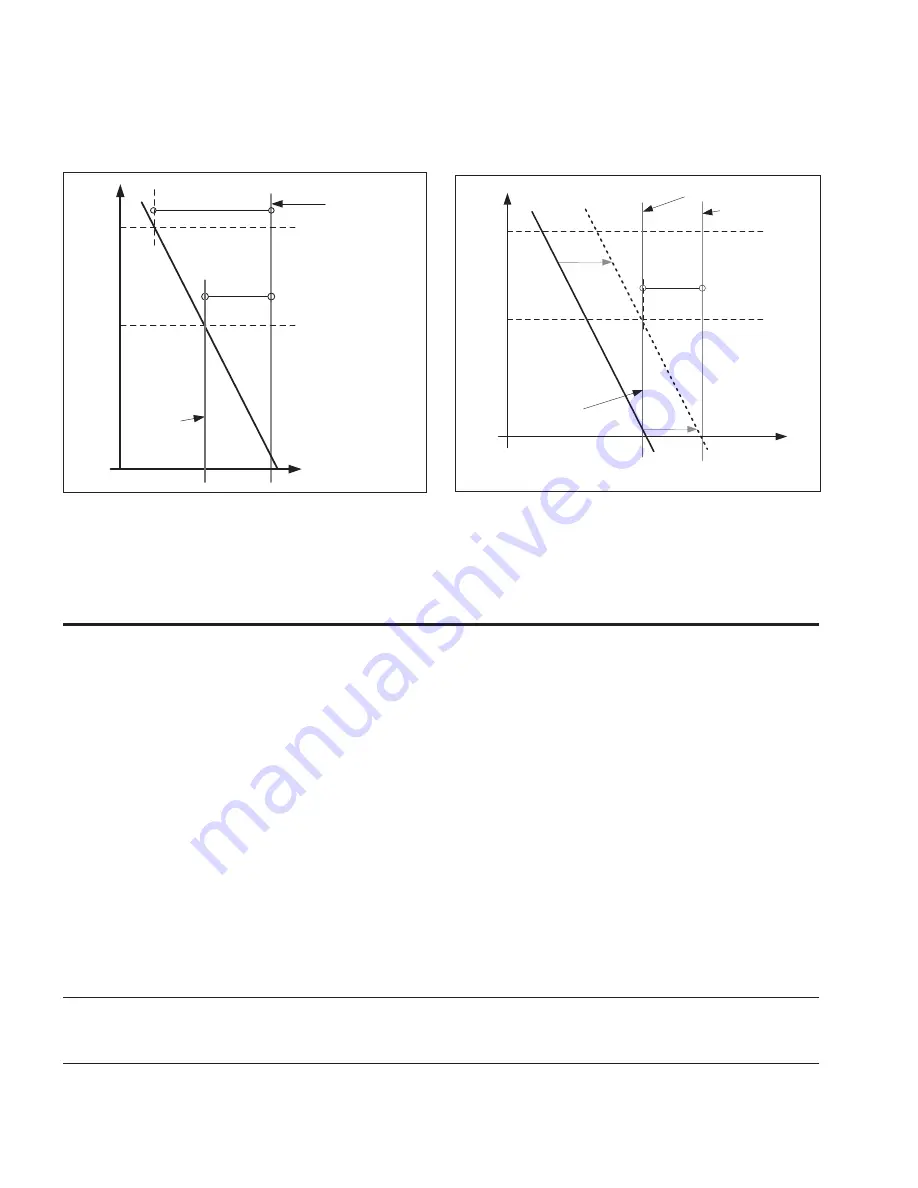
In frequency control, the load will determine the actual shaft
speed
Freq. Out 50 Hz
&
Freq. Ref 50 Hz
T
N
100 %
T
N
50 %
Nominal Slip
Slip
”Shaft
Freq”
Slip compensation in open loop control
The drive uses motor torque and motor nominal rpm to
compensate slip. If the motor nominal rpm is 1440 -> the
nominal slip is 60 rpm. and when the motor torque is 50 %
the slip is 30 rpm. To keep the reference speed the drive
must increase the output frequency by 1 Hz.
Closed Loop control
Closed loop control controls the motor using the exact
information of the motor speed from the encoder. Control
mode selections 3 and 4 are closed loop control modes.
Using these modes without encoder board (and encoder)
will result in encoder fault.
Code
ID
Parameter
Notes
P1.8.1
600
Motor control mode “motor ctrl mode” (2.6.1)
0 “Freq Control”
Open loop frequency control:
Drive frequency reference is set to output frequency without slip compensation.
Motor speed is defined by motor load.
1 “OL SpeedCont”
Open loop speed control:
Drive frequency reference is set to motor speed reference. Motor speed stays the
same regardless of motor load.
2 “OLSpeed/Torq”
Open loop Speed or Torque control
In this control mode the drive can be selected to run in torque control mode. The
operation is selected by parameter TorqueSpeedLimit in the Torque Reference
parameter group. The default selection is torque control mode speed limited by
ramp generator output.
3 “CL SpeedCtrl”
Close loop speed control
Drive frequency reference is set to motor speed reference. Motor speed stays the
same regardless of motor load.
4 “CLSpeed/Torq”
Closed loop speed or torque control
In this control mode the drive can be selected to run in torque control mode. The
operation is selected by parameter TorqueSpeedLimit in the Torque Reference
parameter group. The default selection is torque control mode speed limited by ramp
generator output.
When the drive is follower and drive synch is enabled the motor control mode is
internally set to Frequency control.
P1.8.2
521
Motor control mode 2 “Motor Ctrl Mode2”
With this parameter you can set another motor control mode which is activated with
parameter Mot Ctrl Mode1/2.
The Motor control mode cannot be
changed between open loop and
closed loop while the drive is in
Run state.
Freq. Ref 50 Hz
Freq. Out 51 Hz
”Shaft
Freq”
Slip
T
N
100 %
T
N
50 %







































































