





























144
SPX advanced – description of parameters
SPX ADVANCED APPLICATION MANUAL
SVCH0203—October 2017 www.eaton.com
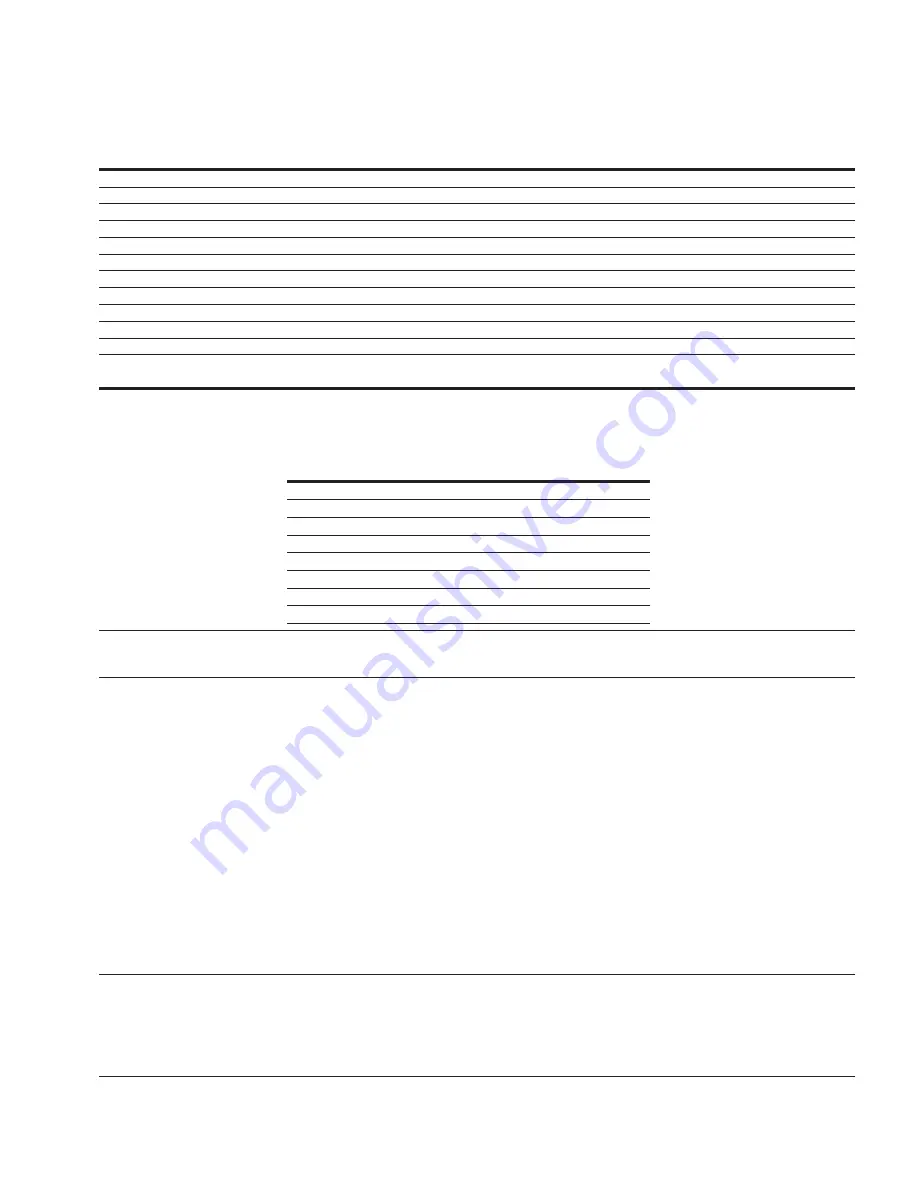
Data
Value
Unit
Scale
ID
Status word
Main status word
FB General status word
MCStatus
64
FB Actual speed
Actual speed
%
0,01 %
Process data OUT 1
Output frequency
Hz
0,01 Hz
1
Process data OUT 2
Motor speed
rpm
1 rpm
2
Process data OUT 3
Motor current
A
0,1 A
45
Process data OUT 4
Motor torque
%
0,1 %
4
Process data OUT 5
Motor power
%
0,1 %
5
Process data OUT 6
Motor voltage
V
0,1 V
6
Process data OUT 7
DC link voltage
V
1 V
7
Process data OUT 8
Active fault code
–
–
37
Default settings:
Code
ID
Description
Notes
P1.13.11 to P1.13.18
876-
833
Fieldbus data IN selections 1 to 8 “FB data in X sel”
Using these parameters, you can control any monitoring or parameter value from the
fieldbus. Enter the ID number of the item you wish to control for the value of these
parameters. Monitoring signals that can be controlled from fieldbus are shadowed.
Default settings:
Data
Value
Unit
Scale
ID
Reference
Speed reference
%
0.01%
–
Control word
Main control word
–
–
–
Control word 2
General control word
Process data IN1
Torque reference
%
0.1%
1140
Process data IN2
Free analog input
%
0.01%
46
Process data IN3
Adjust input
%
0.01%
47
Process data IN4
FB Analog output
%
0.01%
48
PD4 – PD8
Not used
–
–
–
P1.13.19
897
Fieldbus general status word
With this parameter it is possible to select which data are sent in
FBGeneralStatusWord (see for details and availability in used fieldbus manual).
P1.13.20
1741
FB actual speed “FBActualsSpeed”
With this it is possible to select which Actual speed is shown on the fieldbus.
0 = Calculated
This selection shows what the ramp generator output is.
Open Loop
In frequency control mode when only the ramp output is shown on the fieldbus and,
therefore, the motor slip or any other changes of speed due to load changes are not
visible in the actual speed value. However, limiting functions are visible in the ramp
output.
Closed loop
In closed loop control, the limiting functions take place after ramp generator.
When speed is limited by e.g. motoring torque limit the actual shaft speed may be
lower even if FB Actual Speed shows that speed is at reference.
1 = Actual
Open loop
Motor speed is a calculated value (Monitoring variable Motor Speed) showing the load
affect on the speed and slip compensation. Closed loop Motor speed is taken from the
actual encoder signal showing the real speed all the time.
Closed loop
Motor speed is taken from the actual encoder signal showing the real speed all the
time.
P1.13.21
1440
Control slot selector “ControlSlotSel.”
This parameter defines which slot is used as the main control place when two fieldbus
boards have been installed in the drive. When values 6 or 7 are selected, the drive
uses the Fast fieldbus profile. When the Fast fieldbus profile is used, type ‘B’ boards or
other C type boards cannot be used.
0 = All slots
4 = Slot D







































































