



















SIPART DR20
Project Planning Manual
1.
Fundamental Control Technology Terms
1.1 Control
Loop
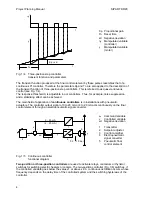
An automatic control system has the function of bringing the output variable x of a controlled
system to a predetermined value and to maintain this value against the influence of disturbances z.
With digital controller, the controlled variable x is measured cyclically and compared with the
command variable w. The resulting negative deviation xd = w - x is processed in the controller to
form the manipulated variable y which acts on the controlled system.
w
2
1
x
y
z
1
-
xd
z
2
z
3
w
Command
variable
x
Controlled variable
xd
Negative deviation
y
Manipulated variable
z
Disturbance variables
1
Controlled system
2
Controlling means
Fig.1/1
Block diagram of a control loop
1.2
Sensors and Transmitters
The controlled variable may be any physical quantity. Frequently encountered variables in process
engineering are e.g. pressure, temperature, level and flow.
Certain sensors such as resistance thermometers, resistance transmitters and thermocouples can
be directly connected to the controller. Otherwise, transmitters supplying an electric output variable
must be connected between the sensor and the controller. Our controllers are designed for
transmitters with standardized signal outputs (0 to 10 V, 0 to 20 mA or 4 to 20 mA).
1.3
Final Control Elements and Actuators
In most cases in heating and process engineering, the manipulated variable y acts through a valve,
a damper or another mechanical positioning device on the controlled system. Three types of
actuators are possible to actuate such final control elements:
•
Electric actuators, consisting of electric motor and gear unit. They have an integral action
and are driven by three-position step controllers. There are also electric actuators with
integrated (series-connected) positioners which then have a proportional action and are
driven by continuous controllers.
•
Pneumatic actuators with compressed air as the supply and with electropneumatic positioner
or converter. These have a proportional action and are driven by continuous controllers.
5







































































