




















Project Planning Manual
SIPART DR20
•
Hydraulic actuators with electrically driven oil pump and electrohydraulic positioner. These
have a proportional action and are also driven by continuous controllers.
Electric actuators with single-phase or
three-phase motors are robust, economical and require
practically no maintenance.
Pneumatic actuators are faster than electric actuators and are also explosion-proof. However, they
are not particularly suitable for large positioning forces.
Hydraulic actuators are fast and can also be used for large positioning forces, but they are more
expensive than electric or pneumatic actuators.
xd
t
step function
control action
step response
P
y
t
Kp
∗
xd
y
0
PD
y
t
Kp
∗
xd
Tv
Vv
Kp
∗
Vv
∗
xd
y
0
=
0
PI
y
t
Kp
∗
xd
Tn
PID
y
t
Kp
∗
xd
Tn
Tv
Vv
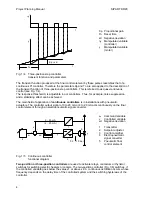
1.4 Controllers
In the input circuit, the
controlled variable x is
compared with the
command variable W and
the negative deviation xd
is determined. This is
processed with or without
a time response into the
output signal. The output
signal of the amplifier can
represent the manipulated
variable w directly, e.g. if it
controls final control ele-
ments or actuators with a
proportional action. With
electric actuators, the
mani- pulated variable y
only appears after the
actuator. The positioning
increments required are
obtained as a PDM signal
from the con- troller output
by conversion.
Depending on the con-
struction of this circuit, the
controller has a
proportional (P),
proportional-differential
action (PD), proportional-
integral action (PI) or
proportional-integraI-diffe-
rential action (PID).
Fig. 1/2
Step responses with different control actions
6







































































