




























SIPART DR20
Project Planning Manual
S34
0
2
1
3
4
RB
RC
SES
MuSt
H
0
1
BA
S35
y'
y
A
y
R
/y
N
SES
y
H
y
S
y
ES
H
+
+
-
S42
H
N + DDC
S31
0
2
1
y
Bl
Si
+
-
S32
0
1
t
A
t
E
SES
S39
S40
-
∆
y
y
+
∆
y
S33
S21
0 0
2
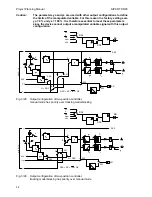
Fig.3/32
Output configuration of three-position step controller with external position
feedback, tracking mode/blocking has priority over manual mode
S34
0
2
1
3
4
RB
RC
SES
MuSt
H
0
1
BA
S35
y'
y
A
y
R
/y
N
SES
y
H
y
S
y
ES
H
+
+
-
S42
H
N + DDC
S31
0
2
1
y
Bl
Si
+
-
S32
0
1
t
A
t
E
SES
S39
S40
-
∆
y
y
+
∆
y
S33
S21
0 0
DDC = RC = INT
∗
CB
2
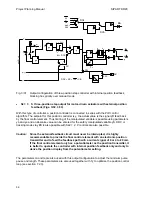
Fig. 3/33
Output configuration of three-position step controller with external position
feedback manual mode has priority over tracking mode/blocking
57







































































