




























SIPART DR20
Project Planning Manual
7.3.2
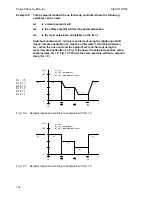
Adjustment of Control Parameters According to Transient Function
If the transient function of the controlled system is known or can be determined using a recorder,
the control parameters can be set according to guidelines found in the technical literature. The
transient function of the system can be recorded in manual mode by suddenly changing the
manipulated variable and recording the controlled variable with respect to time.
A transient function results for controlled systems with recovery to which good average values
apply from the setting data of several authors with the following rules-of-thumb:
•
P controller:
Proportional gain
Kp = Tg / (Tu
∗
Ks)
•
Pl controller:
Proportional gain
Kp = 0,8 Tg/ (Tu
∗
Ks)
Reset time
Tn = 3
∗
Tu
t
y
y
•
PlD controller:
Proportional gain
Kp = 1.2
∗
Tg / (Tu
∗
Ks)
Reset time
Tn = Tu
Derivative action time
Tv = 0.4 Tu
0
T
U
t
x
T
g
x
K
S
= x / y
Fig. 7/1
Transient function of a controlled system with
recovery
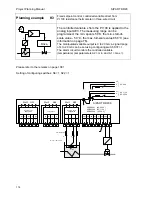
7.3.3
Response with Controlled Variable Subject to High Interference
•
Set configuring switch S3 to the mains frequency (50 or 60 Hz) of the power supply in order
to largely suppress interferences from the mains frequency. The factory setting is 50 Hz.
•
1
st
order filter for negative deviation (parameter tF): the filter is switched on by the jump in the
display from OFF to 1 s and can be matched to a low-frequency interference by increasing
the value further. The filter time constant should only be set so large that the control loop
would not oscillate with a large dead zone (set tF smaller than Tg).
It is highly recommendable to switch on the filter when using the D element with S27 = 0, in
order to suppress the A/D converter noise amplified by Kp and Vv.
•
If the controller output is to be smoothened in addition, the response threshold A, which
results in S controllers from the setting of te, can be increased or the response threshold can
be switched on with K controllers. It should be taken into account that the steady-state
deviation can assume the value of the set response threshold. The response threshold A can
be adjusted in the range from 0 to 10 % in steps of 0.1 %.
99