
























Project Planning Manual
SIPART DR20
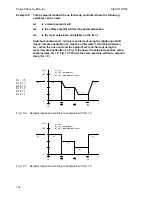
S 1 = 0
S 15 = 1
S 16 = 0
S 17 = 1
S 19 = 1
100
0
w
1
w
2
T
w
t
w (%)
w
1
Si = 1
Si = 0
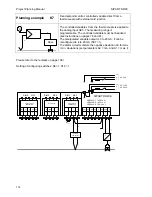
Fig. 11/2
Setpoint response according to example 2
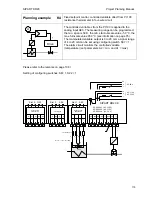
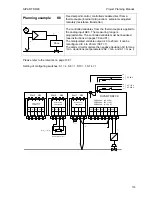
Example 3:
Two-setpoint mode with a synchronization controller without local / remote
switchover:
1.
One variable setpoint
w1 = c2
∗
wE + c1
2.
The setpoint w2 = c1 defined by parameterization and not affected by
the front controls
Both setpoints are thus linked by the fixed component c1; the switch-over
from w1 to w2 takes place simply by external switching off of w2. A setpoint
ramp Tw > 0 is provided.
S1 = 6
100
0
w
1
w
2
w
E
= 0
t
w (%)
w
1
= w
E
* c2 + c1
w
2
= c1 (parameter)
w
E
T
w
Fig. 11/3
Setpoint response according to example 3
104







































































