
























SIPART DR20
Project Planning Manual
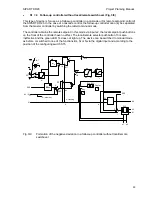
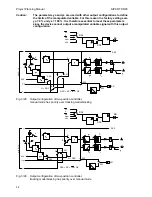
Matching to direction of action:
The basic setting of the controller applies to systems with a normal action. In the case of reversed
systems, the sign of the proportional gain Kp can be inverted using configuring switch S26. As can
be seen in Fig. 3/20, this applies to the P and I components as well as to the D element to which a
disturbance variable can also be applied.
D element:
The input signal for the D element can be selected using configuring switch S27. Xd is
differentiated with the factory setting. S27 must be set to 1 if modifications in the setpoint are not to
be differentiated as well. If the input signal x2 is to be applied as a dynamic disturbance variable,
configuring switch S27 must be set to 2 or 3.
The D element can be switched off in the control level if the parameter Tv ("d-element") is set
below 1 s to "OFF".
As long as the controller is ineffective as a result of an intervention in the output circuit, the D
element is automatically tracked such that its output is held at zero.
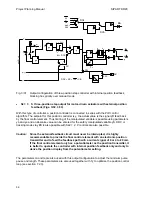
P/PI control algorithm:
The P (D) and PI (D) control algorithms are implemented in the same
manner independent of the output configuration (S or K). Configuring switch S28 is used to select
P or PI control. As can be seen in Fig. 3/20, the algorithm has a parallel configuration with
interaction-free parameter setting. The following controller equations apply to a normal-action
system if the cycle time, filter time constant tF and response threshold A are neglected:
P controller
yA
=
Kp
∗
xd
+
y
0
PI controller
yA
=
Kp
∗
(xd + 1/Tn
∫
xd
∗
dt)
+
y
o
(t)
Switch over to automatic mode:
If automatic mode is not present, the I component or the
working point y
o
is tracked so that switchover to automatic mode is hitchless with PI and P
controllers. Any D component which may still be effective is set to 0. This tracking results in
automatic setting of the working point y
0
in the P controller in manual, tracking (DDC) and safety
mode and with blocking of the manipulated variable. The following applies if the controller is started
up in manual mode:
y
0
= yH - Kp
∗
(w - xH)
or
y
0
= yH - Kp
∗
(w - xH) - c2
∗
x2
If xH is driven to the desired setpoint in the process, the following applies:
y
0
= yH
or
y
0
= yH - c2
∗
x2
With software version A06 and greater, it is also possible to adjust the working point y
0
by
manual setting in the parameterization level (see table 6/1, page 90).
45







































































