

























Project Planning Manual
SIPART DR20
•
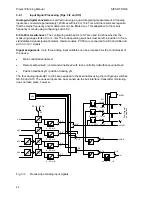
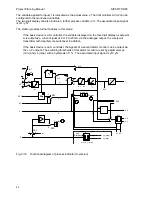
S1 = 5 Follow-up controller with local/remote switch over (Fig. 3/13)
This controller type is suitable for SPC mode and operation with two or three setpoints (wi, wE,
wS). The remote setpoint can be entered either via an analog input as a variable wE or via the
serial interface as wES.
In SPC mode the setpoint is tracked by a higher-level computer (control system). SPC mode is
present if the device is switched to remote setpoint and the signal CB is present simultaneously:
NOT(
H
) AND
CB
AND NOT(
I
) =
RC
= 1
A status LED does not light up in this (normal) case. The green LED 14 flashes with a duty cycle of
0.5 if the computer fails (CB = 1
Æ
0) and further control is made either with the local setpoint wi
which tracked the last valid setpoint (S18 = 0) or with the parameterized safety setpoint wS
(x-tracking is also possible if automatic mode is not present = /A). If the setpoint selector 13 is
activated (INT = 1), the green LED becomes steady and the setpoint can be adjusted manually.
The green LED flashes with a duty factor of 0.9 if the CB signal reappears during local mode but
this mode is retained until a remote setpoint is again selected using pushbutton 13.
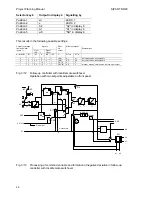
The following table (Fig. 3/10) provides a summary of signals and effective setpoints depending on
control signals and the configuring switches S17, S18 and S19.
Signals
Control commands
front and digital
inputs **)
Front
LED ***)
Digital
output
Effec-
tive
output
Effective setpoint
S19=0
H+N+Si+BL CB INT INT H /RB /RC Y
S17=0
S18=0
=1
=0
=0
=1
=1
=1
Explanations
Com
p
u
ter
failure
0
1
0
0
0
0
0
yA(n)
wE(n) *)
wE(n) *)
wE(n) *)
wE(n) *)
Automatic mode, SPC-mode
0 0
0
0,5
0
0
1
yA(n)
wi(n)
wi(n)
wS wS Automatic
mode,
computer
switched OFF, controller at SPC
standby
0
1
1
0,9
0
1
1
yA(n)
wi(n)
wi(n)
wi(n)
wi(n)
Automatic mode, computer at
standby, controller not at SPC
standby
0 0
1
1
0
1
1
yA(n)
wi(n)
wi(n)
wi(n)
wi(n)
Automatic
mode,
computer
switched OFF, controller not at
SPC standby
1 1
0
0
>
0
1
1
yH or
wE(n) *)
x
wE(n) *)
x
1 0
0
0,5
>
0
1 1 yE
or wi(n) x
wS
x
1 1
1
0,9
>
0
1 1 yS
or wi(n) x
wi(n) x
1 0
1
1
>
0
1 1 yBL wi(n) x
wi(n) x
Manual, tracking, safety mode
or blocking of output,
controller not at SPC standby
Fig. 3/10
Follow-up controller with local/remote switchover,
SPC controller with tracking of local setpoint (S19 = 0)
*)
Sources for wE are wEA (remote analog value, e.g. from master controller) or wES
(remote value via serial interface). Only wES can be tracked, of course, not wEA
(see Fig. 3/13).
**) When using the digital input BE, only one of the control variables CB, Si, BL or N is possible
as defined by S15. The priority is Si before BL before N (DDC) when applied via the
serial interface.
***) The data on "Signals front LED" (e.g. 0.5) refer to the flashing frequency (see 3.2.6).
(n) The variable is made to track the last value effective before switchover.
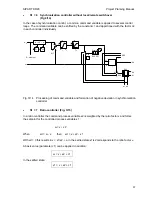
NOT(
RC
) = NOT{NOT(
INT
) AND
CB
AND NOT(
H
)}
NOT(
RB
) =
INT
OR
H
34