





























Project Planning Manual
SIPART DR20
7.2
Matching of Step Controllers to Final Control Elements
7.2.1
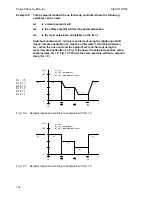
Two-Position Controller (S2 = 1)
The division into two zones (e.g. heating and cooling) or only one zone (only heating or only
cooling) using parameters ya and ye has already been described on pages 52/53. In addition, the
parameters T+ and T- must be matched to the period of the units connected to +
∆
y and -
∆
y. The
values should be selected as large as possible, the following must be observed:
•
Large values of T + and T - result in low wear on the internal and external switching
equipment
•
Large values result in a periodic oscillation of the controlled variable x which becomes larger
the faster the controlled system is.
7.2.2
Three-Position Step Controller with Internal Position Feedback (S2 = 2)
•
The parameter Ty is used to specify the positioning time for the actuator. The factory setting
of this parameter is 60 s.
•
The minimum switch-on period te adjustable using configuring switch S39, should be
selected at least so large that the actuator is positively set into operation, taking into account
the series-connected circuit-breaker. The larger the value of te, the smoother and more
resistant to wear are the switching elements and actuators. The dead band is also larger,
however, in which the controller cannot control in a defined manner since the resolution of
the controlled variable decreases as the minimum switch-on period increases.
-
Factory setting is te = 200 ms, which corresponds with a 60 s actuator to an y resolution of
100 %
∗
te
100 %
∗
200 ms
∆
y = -------------------- = ------------------------- = 0.33 %
Ty
60
s
-
This minimum possible resolution is weighted with the control loop gain Ks to the controlled
variable
∆
x = Ks
∗
∆
y
•
The minimum switch-off period ta adjustable using S40, should be selected so large that the
actuator has positively become stationary, taking into account the series-connected circuit-
breaker, before a new positioning pulse - especially in the opposite direction - arrives. The
switching elements and actuators operate smoother and with less wear the larger the value
of ta, but the dead time of the controller also becomes larger. The values for te and ta are
normally the same.
96







































































