





























148
6. Torque Control
6.5 Speed limit
NOTE
• The second acceleration/deceleration time can be set.
• When speed limit command exceeds
Pr.1 Maximum frequency
setting, the speed limit value becomes
Pr.1
setting. When
speed limit command falls below
Pr.2 Minimum frequency
setting, the speed limit value becomes
Pr.2
setting. Also, the
speed limit command is smaller than
Pr. 13 Starting frequency
, the speed limit value becomes 0 Hz.
• To use analog inputs to perform speed limit, calibrate analog input terminals 2 and 4. (Refer to
.)
• To use analog inputs to perform speed limit, turn OFF the external signals (RH, RM, RL). If any of the external signals (RH,
RM, RL) is ON, speed limit by multi-speed are enabled.
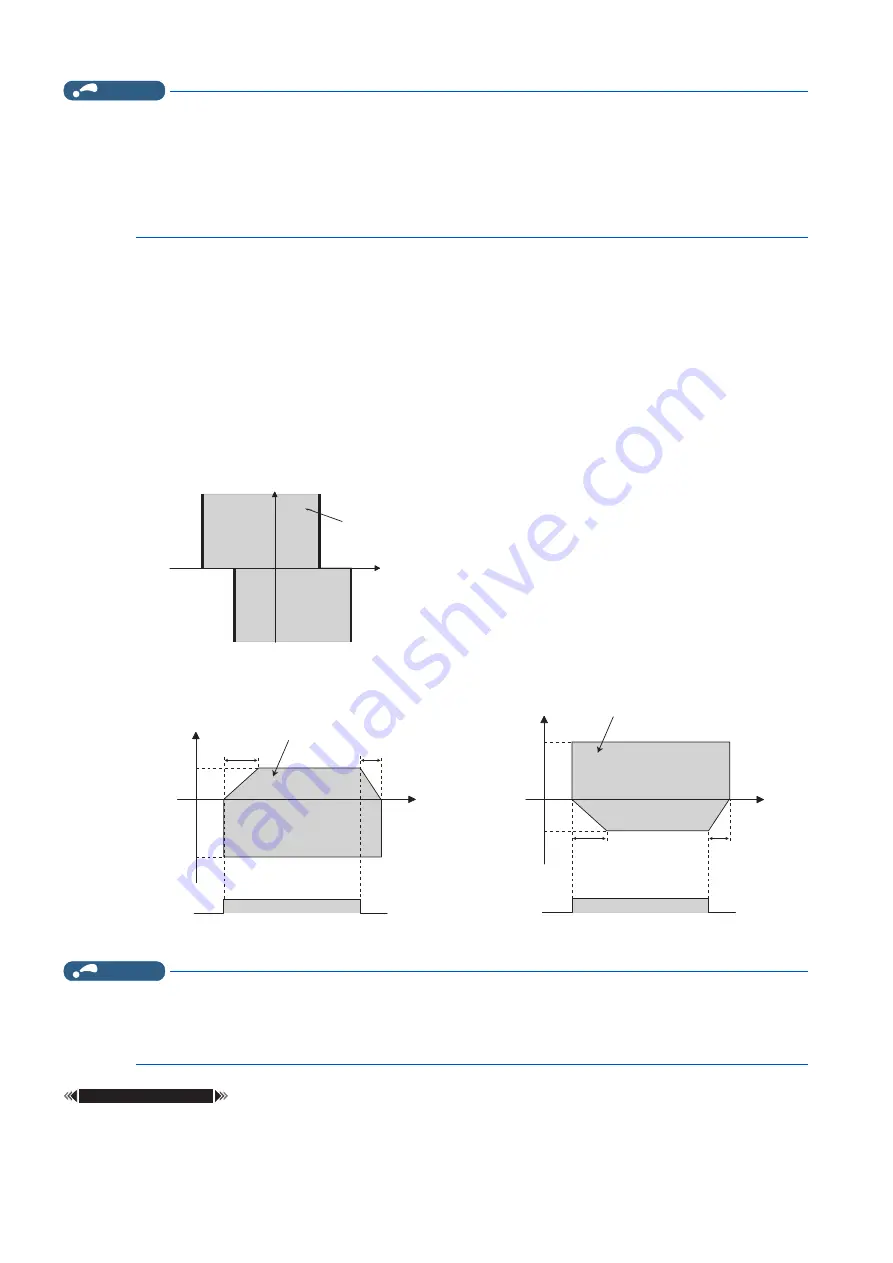
Speed limit by parameters (Pr.807 = "1")
• Following the polarity change in the torque command, the polarity of the speed limit value changes. This prevents the
speed from increasing in the torque polarity direction. (When the torque command value is 0, the polarity of the speed limit
value is positive.)
• When
Pr.807 Speed limit selection
= "0", the setting during speed control is applied for the speed limit. When
Pr.807
Speed limit selection
= "1",
Pr.808 Speed limit
is applied for the speed limit.
• When the load has reversed the rotation opposite to the torque polarity, the setting of
Pr.809 Reverse-side speed limit
is applied for the speed limit. (The speed limit value and reverse-side speed limit value are limited at
Pr.1 Maximum
frequency
.)
NOTE
• During the speed limit operation, "SL" is displayed on the operation panel and the OL signal is output.
• For the OL signal, set "3" (positive logic) or "103" (negative logic) in one of
Pr.190 to Pr.196 (Output terminal function
selection)
to assign the function to the output terminal. Changing the terminal assignment using
Pr.190 to Pr.196
may affect
the other functions. Set parameters after confirming the function of each terminal.
Parameters referred to
Pr.1 Maximum frequency, Pr.2 Minimum frequency
Pr.4 to Pr.6, Pr.24 to Pr.27, Pr.232 to Pr.239 (multi-speed operation)
Pr.7 Acceleration time, Pr.8 Deceleration time
Pr.13 Starting frequency
Pr.190 to Pr.196 (Output terminal function selection)
Pr.7
ON
OFF
Start signal
Rotation speed
Time
Torque
command
value
Speed limit value
-Speed limit value
Reverse-side
speed limit value
Reverse-side
speed limit value
Rotation speed
-Pr.809
Pr.809
Range where torque
control is available
Range where torque
control is available
Speed limit value
Pr.8
Pr.809
Reverse-side
speed limit value
Pr.7
ON
OFF
Start signal
Rotation speed
Time
Speed limit value
Pr.8
-Pr.809
Reverse-side
speed limit value
Range where torque
control is available
When the torque command value is negative
When the torque command value is positive
Summary of Contents for FR-E800
Page 17: ...16 1 Introduction 1 3 Related manuals MEMO ...
Page 51: ...50 2 Basic Operation 2 8 I O terminal function assignment MEMO ...
Page 89: ...88 3 Parameters 3 4 Parameter list by function group number MEMO ...
Page 135: ...134 5 Speed Control 5 9 Troubleshooting in the speed control MEMO ...
Page 153: ...152 6 Torque Control 6 7 Troubleshooting in torque control MEMO ...
Page 195: ...194 8 E Environment Setting Parameters 8 18 Current average value monitor signal MEMO ...
Page 237: ...236 10 D Operation Command and Frequency Command 10 6 Operation by multi speed setting MEMO ...
Page 339: ...338 13 T Multi Function Input Terminal Parameters 13 9 Start signal operation selection MEMO ...
Page 455: ...454 16 G Control Parameters 16 13 Speed smoothing control MEMO ...







































































