





























EN UG-020 Link 6 user guide r1.0
47
Directives specific to the integrator
The
integrator
is responsible for the safe use of Link 6. For the robot to be used safely, there are
certain directives the integrator must follow.
Important:
Link 6 does not support Power and Force Limiting (PFL) collaborative mode as
described by ISO TS 15066. Keep this in mind during analysis and assessment phases.
• Perform a hazard analysis for the robot and the robot cell.
Important:
Hazard analysis is a mandatory activity to have a complete risk
assessment.
• Perform a risk assessment based on the system, the environment, and the user before
installing Link 6.
• Include any and all external equipment, objects, and any other parts of the complete robot
system added by the integrator in the risk assessment.
• Include specific precautions with respect to earthquakes when the robot is installed in an
earthquake zone.
• Design the robot cell so that it is optimally ergonomic.
• Install the
such that they are easily accessible for maintenance
purposes.
• Install the arm and the controller such that they do not impede on the ergonomics of the entire
robotic environment.
Danger
DANGER:
A danger is an impending hazardous situation that can result in serious injury or
even death, or can severely damage property. Avoid impending hazardous situations that
are associated with dangers.
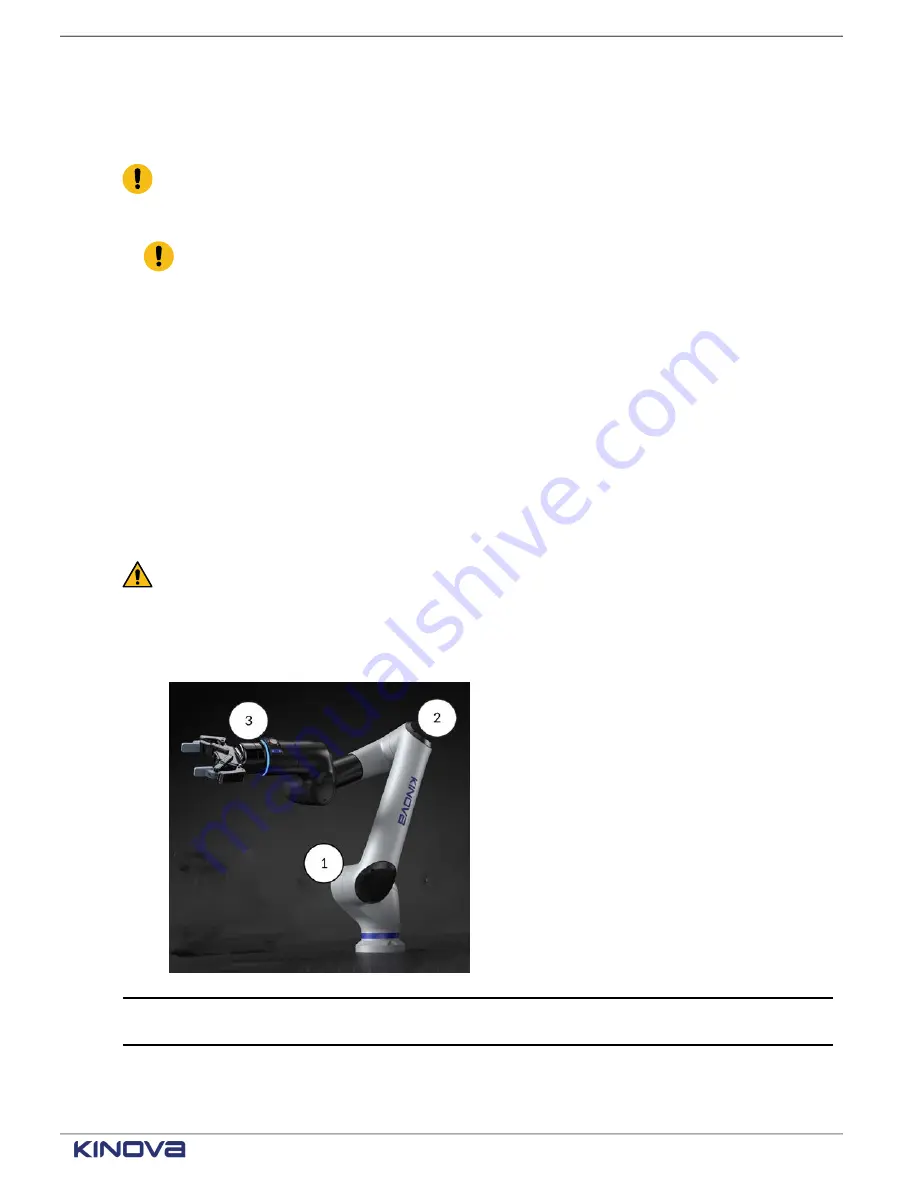
Keep objects and hands out of
zones. Pinch points directly on the robot are located at the
shoulder, elbow, and wrist.
1
shoulder
2
elbow
3
wrist
Disconnect the power supply and perform
Lockout Tagout
procedures when maintenance tasks must be
performed.
+1 514-277-3777
kinovarobotics.com
© 2022 Kinova inc. All rights reserved.
Summary of Contents for Link 6
Page 1: ...Link 6 user guide Optional gripper shown ...
Page 8: ......



































































