





























EN UG-020 Link 6 user guide r1.0
159
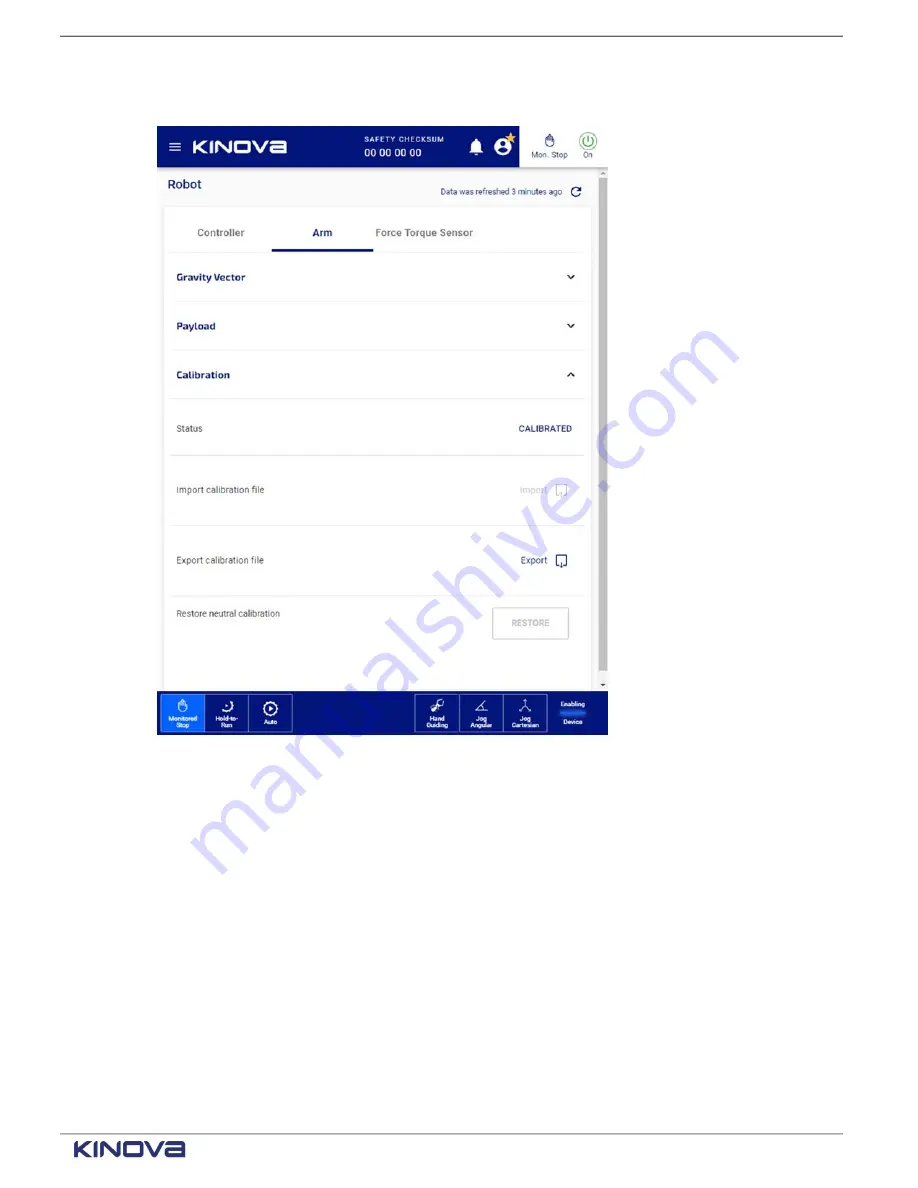
14.
Tap
Calibration
to access configurable parameters to calibrate the arm.
The
Calibration
pane launches.
15.
Look at
Status
for the current calibration status of the arm.
The status of the calibration indicates whether there are issues before you start using the
robot.
• Calibrated
• Not Calibrated
• Waiting Arm Power On
16.
Tap
Import
from the
Import calibration file
pane to import a calibration file when the
controller is replaced.
Calibration files can be imported only when the robot is idling with the arm switched off. The
arm is recalibrated with the content of the file only after a reboot of the robot.
17.
Tap
Export
from the
Export calibration file
to export the current calibration file before
changing the controller.
18.
Tap
RESTORE
in the
Restore neutral calibration
pane.
Neutral calibration implies the arm is not calibrated.
Configuring collision detection on the arm
+1 514-277-3777
kinovarobotics.com
© 2022 Kinova inc. All rights reserved.
Summary of Contents for Link 6
Page 1: ...Link 6 user guide Optional gripper shown ...
Page 8: ......