





























MM4006
M
o
t
i
o
n
Control Tutorial
PI Loop
To eliminate the error at stop and during long constant velocity motions
(usually called steady-state error), an integral term can be added to the
loop. This term integrates (adds) the error every servo cycle and the value,
multiplied by the Ki gain factor, is added to the control signal (Fig. 4.15).
Trajectory
Generator
Motion Controller
Servo Controller
•
f c • x K
Fig. 4.15 — PI Loop.
Motor
y D r i v e r
▶
Encoder y
The result is that the integral term will increase until it drives the motor by
itself, reducing the following error to zero. At stop, this has the very desir-
able effect of driving the positioning error to zero. During a long constant-
velocity motion it also brings the following error to zero, an important
feature for some applications.
Unfortunately, the integral term also has a negative side, a severe destabi-
lizing effect on the servo loop. In the real world, a simple PI loop is usually
undesirable.
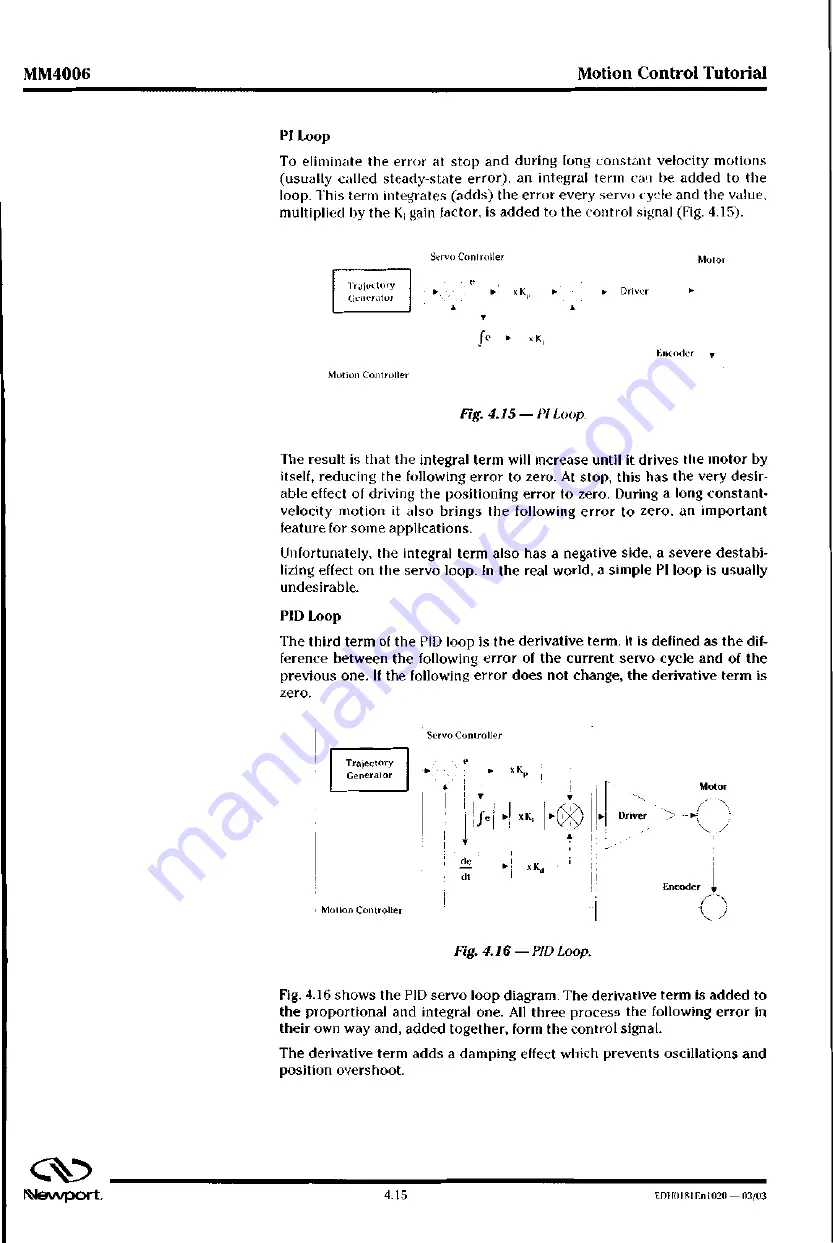
PID Loop
The third term of the PID loop is the derivative term. It is defined as the
dif-
ference
between the following error of the current servo cycle and of the
previous one. If the following error does not change, the derivative term is
zero.
Trajectory
Generator
Motion Controller
Servo Controller
Fig. 4.16 — PID Loop.
Encoder
Motor
Fig. 4.16 shows the PID servo loop diagram. The derivative term is added to
the proportional and integral one. All three process the following error in
their own way and, added together, form the control signal.
The derivative term adds a damping effect which prevents oscillations and
position overshoot.
N e w p o r t .
4
.
1
5
E
D
I
-
1
0
1
8
1
E
n
1
0
2
0
— 03/03
Содержание MM4006
Страница 9: ...F D110181En1020 03 03 b J e w p o r t...
Страница 10: ...Section 1 Introduction 4 4 G G 4 4 4 4 M u d Com 4k 4 66i1W406 i i r i A 0 8 y 0 9 0 0 i 0 0 40 0 4 cv Newport...
Страница 11: ...MM4006 8 Axis Motion Controller Driver evvport...
Страница 41: ...MM4006 Introduction FPI 111181Eli11120 0 1 03 1 3O tNevvport...
Страница 42: ...Section 2 Local Mode C Newport...
Страница 43: ...MM4006 8 Axis Motion Controller Driver C N e w p o r t...
Страница 96: ...Section 3 Remote Mode C klevvport...
Страница 97: ...Newport...
Страница 310: ...Section 4 Motion Control Tutorial Ilevvport...
Страница 311: ...MM4006 8 Axis Motion Controller Driver C EDI10181En 1020 03 03 2 N e V V p O r t...
Страница 313: ...MM4006 8 Axis Motion Controller Driver cv ED110181E01020 03 03 4 2 M e v v p o r t...
Страница 334: ...Section 5 Trajectory Functions Tutorial Newport...
Страница 335: ...MM4006 8 Axis Motion Controller Driver C Newport...
Страница 337: ...MM4006 8 Axis Motion Controller Driver EDH0181En1020 03 03 5 2 N e w p o r t...
Страница 346: ...Section 6 Feature Descriptions Tutorial Newport...
Страница 347: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Страница 349: ...MM4006 8 Axis Motion Controller Driver ED11018lEn I 020 03 03 6 2 N e v v p O r t...
Страница 359: ...MM4006 F e a t u r e Descriptions Tutorial cv EDI10181En1020 03 03 6 12 N e w p o r t...
Страница 360: ...Section 7 Servo Tuning rano at 1 2 2 p EOF 110 1 0 0 0 0 0 ill fpL4 cv Newport...
Страница 361: ...MM4006 8 Axis Motion Controller Driver C Nevvport...
Страница 363: ...MM4006 8 Axis Motion Controller Driver EDH0181En 1020 03 03 7 2...
Страница 368: ...Section 8 Appendices INevvport...
Страница 369: ...MM4006 8 Axis Motion Controller Driver CkJ Newport...
Страница 371: ...MM4006 8 Axis Motion Controller Driver EDI10181EnI020 03 03 8 2 N e v v p o r t...
Страница 410: ...A7 h7s z c 7...







































































