





























Signal correction (GPOC)
GPOC is a special Moog online process for improving the quality of Sin/Cos signals
before they are used to calculate a position. If “SINCOS(1)” is selected as the “main
interface,” this process may be useful. For details see Section "Signal correction
GPOC (Gain Phase Offset Correction)" on page 74.
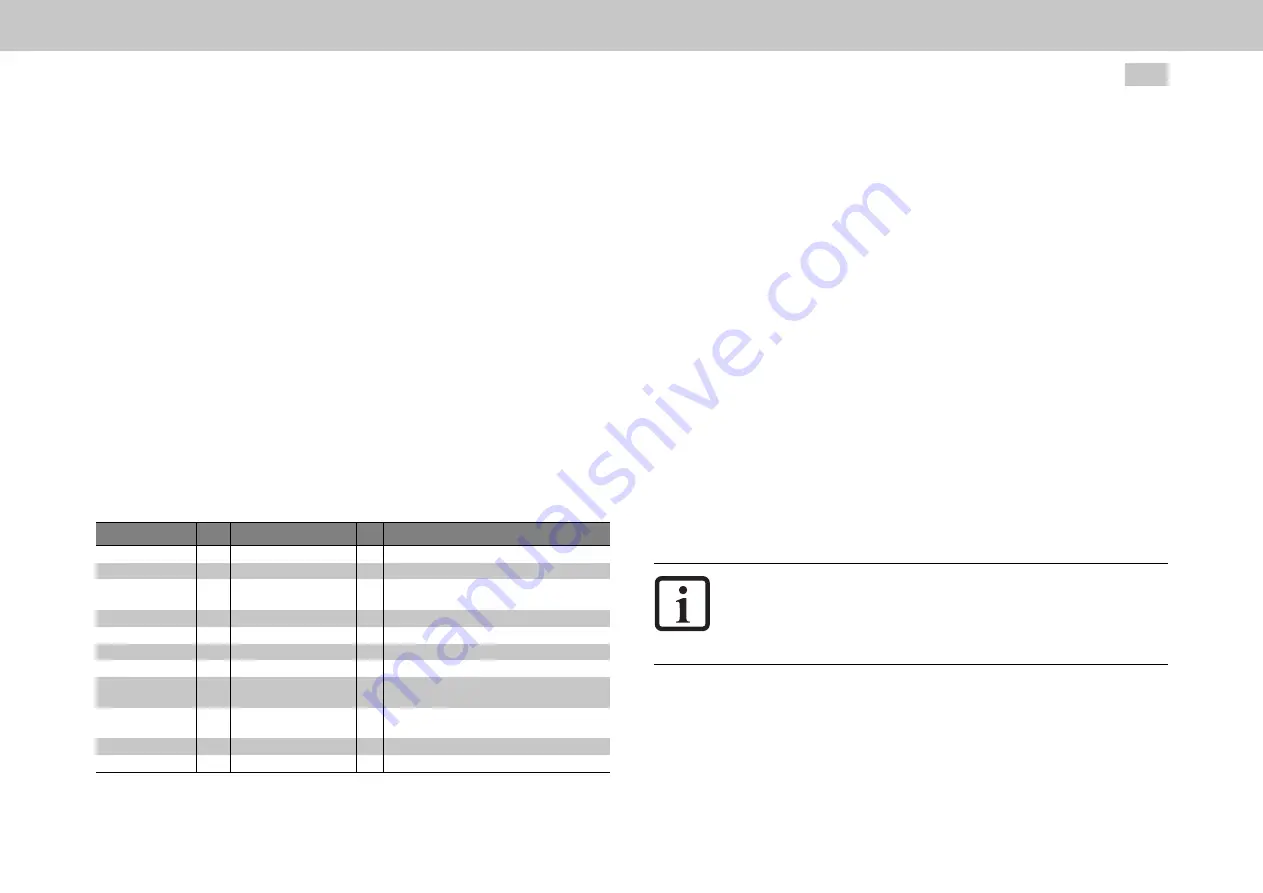
6.7.1 Main parameters for encoder channel Ch3
The following table lists the most important parameters for the Ch3 encoder channel.
These parameters are described in the chapters that go over selecting the various
encoders with P 507[0] - ENC_CH3_Sel and P 570[0] - ENC_CH3_Abs.
The Lines, MultiT und SingleT parameters are self-explanatory.
Code and Mode are used to set SSI modes. If Mode=1, wire break monitoring (if any)
will be disabled, for example. If Mode = 0, it will be enabled instead (default).
In the case of linear encoders, PeriodLen and DigitalResolution will be needed
instead of MultiT and SingleT.
P No.
Index Name / Setting
Unit Description
507
0
ENC_CH3_Sel
Main selection on encoder channel Ch3
570
0
ENC_CH3_Abs
Absolute value interface for one-time reading
572
0
ENC_CH3_Lines
Number of analog Sin/Cos lines per revolution
(TTL lines as well)
573
0
ENC_CH3_MultiT
Number of multi-turn bits for the digital interface
574
0
ENC_CH3_SingleT
Number of single-turn bits for the digital interface
575
0
ENC_CH3_Code
Code selection (for SSI encoders) (binary, Gray)
576
0
ENC_CH3_Mode
Mode selection (for SSI encoders)
583
0
ENC_CH3_
DigitalResolution
nm
Linear encoders: Length of a digital increment in
nm (nanometres)
584
0
ENC_CH3_MTBase
Definition of point of discontinuity in multi-turn
range
585
0
ENC_CH3_MTEnable
Enable MultiTurn use (negative logic, 1=MToff)
636
0
ENC_CH3_CycleCount
Sampling cycle in: n x 125 μ (microseconds)
Table 6.20: Main parameters for encoder channel Ch3
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
80
6 Encoder
l
P 577[0] - ENC_CH3_EncObsMin
If you set
EncObsMin
to 0, Sin/Cos wire break monitoring will be disabled.
The default value is 0.2 (20%) and stands for a calculated amplitude value
(calculated using the two Sin/Cos signals) of x = sqrt(a² + b²). If the Sin/Cos
signals are equal to approx. 1 Vss when compared, approx. 0.8 will be
calculated here (approx. 80% magnitude at the A-D converters; approx. 0.25
Vss Sin/Cos will yield approx. 0.2 here (20% magnitude at the A-D
converter)). The error threshold can adjusted with
EncObsMin
.
l
P 584[0] - ENC_CH3_MTBase
When used with its default setting, this parameter will ensure that the
absolute value initialization “starts up with plus-minus”. I.e. the encoder’s
multi-turn value range from 0 to max will be mapped to -½ max to +½ max.
The range from +½ max to max will be initialized as
negative
; in this case, the
point of discontinuity will be found at ½ max. This can be changed with
MTBase
. When MTBase = 0, the absolute value initialization will, for
example, “start up with zero to max”. I.e. the encoder’s multi-turn value range
from 0 to max will be mapped to 0 to max. The range from +½ max to max will
be initialized as
positive
; in this case, the point of discontinuity will be found
at 0.
l
P 585[0] - ENC_CH3_MTEnable
If you set
MTEnable
to 1, you can use an available multi-turn rotary encoder
as a single-turn rotary encoder, which can come in handy for testing
purposes.
NOTE
l
As there are various protocol modes available for SSI encoders
(with/without wire break monitoring, with/without parity bit, etc.),
consult with your project supervisor or the Helpline provided by
Moog before using any special SSI protocol modes.
As the functionality of the parameters for encoder channel Ch3 is predominantly
identical to that of the parameters for encoder channel Ch1, it is recommended to
read the description for the Ch1 encoder channel parameters.







































































