





























The position of a hydraulic cylinder can be influenced directly with the controlled
volumetric flow rate. If a position sensor is mounted on the cylinder, it can be used to
determine the exact position of the cylinder. The position is preset roughly by means
of a volumetric flow control. The feed-forward control variable is calculated in the
hydraulic motion profile using the cylinder model and the displacement volume of
the pump. Alternatively, the feed-forward control variable can also be specified in
mm/s via a higher-level control system P 2881[0] HYD_AddValues. For this, selector
P 2880[0] PosCon_RefSpdFF must be switched to "(1) from EXTERNAL". For better
optimization and analysis, the feed forward control value can be viewed in P 2843
[30] RefSpdFF as the actual value or can be recorded in the scope. The scaling
factor of the feed-forward control variable P2842[2] SFF remains active. The
remaining control difference can then be stabilized accurately using a steady-state
PI controller.
If, in the case of double-acting cylinders, positioning is to be performed in both the
positive and negative directions, the simplest application will require at least one
changeover valve. Care must be taken to ensure that the force direction and valve
position are compatible because otherwise an inadmissibly high volumetric flow rate
and pressure will be generated by the position controller due to the unchanged
control deviation. The actuating valves can be controlled in different modes (see
Section "Hydraulic Motion profile" on page 190). Moreover, the volumetric flow rate
control must be parametrized and the cylinder geometries must be configured.
NOTE
l
To simplify the control circuit, the I component
(
P 2848[1] - Tn
) of the controller must be set to 10000 ms and
thereby has no influence on the control. The position control can
thus be operated by means of feed forward control and
P controller.
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
204
7 Control
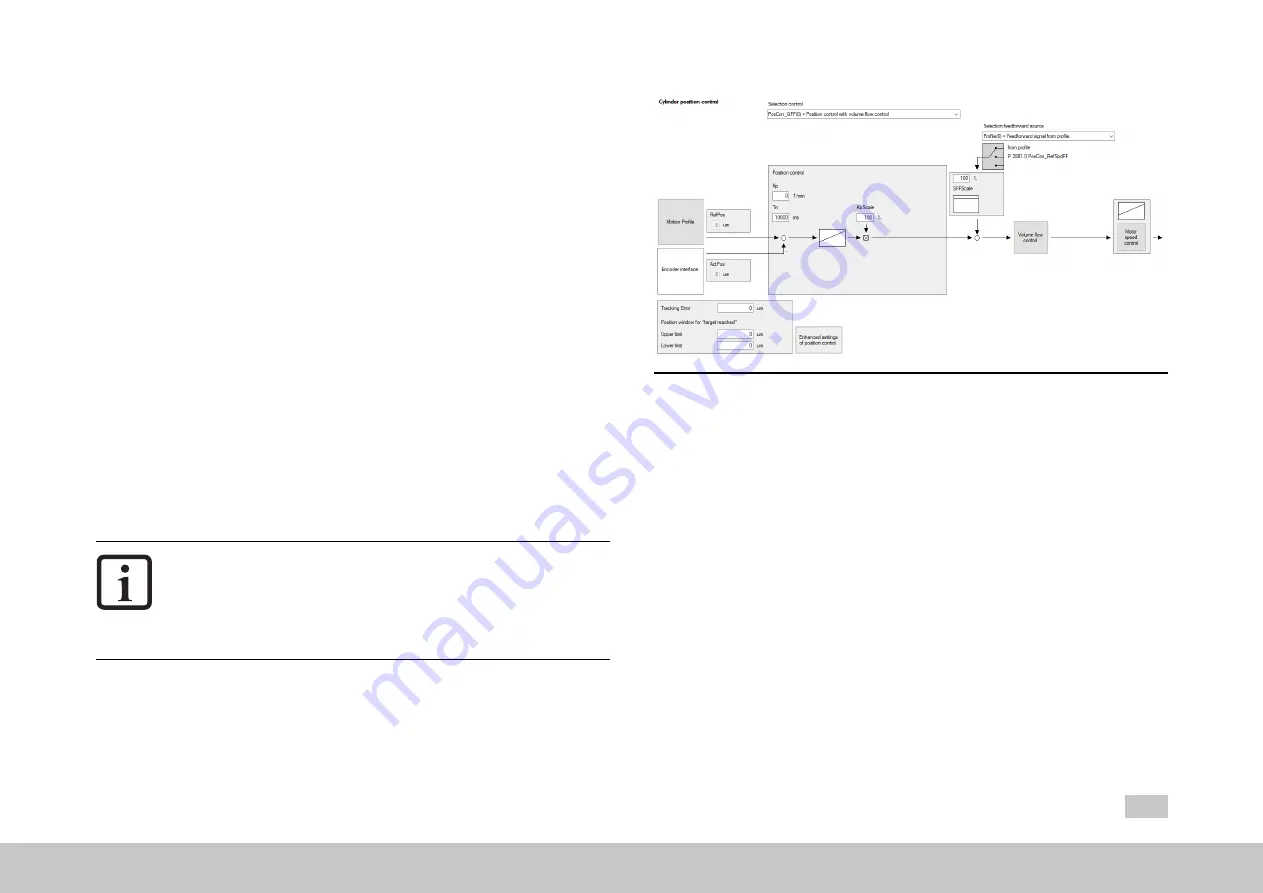
Image 7.74: “Hydraulic - position control” screen PosCon_QFF(0)
Position control with pressure limitation:
If it is necessary to limit the maximum permissible pressure during the positioning
operation, the control structure can be expanded to include a higher-order pressure
regulator (P 2840.12 - AltPosCon = PosCon_pLimit(2)). The control structure of the
pressure limiting controller differs from that of the standard pressure controller, but
the same parameters are used for gain and integral-action time. The structure does
not allow the controller to be operated without the integrating part. Consequently, it
makes sense to work with a gain factor that is not too high so as to avoid exciting the
control circuit. If the pressure needs to be restricted for a certain positioning
operation, a partial process or an individual motion block, a scaling factor P 2872 -
HYD_TabLimit can be used to adapt the pressure limitation for each motion block.







































































