





























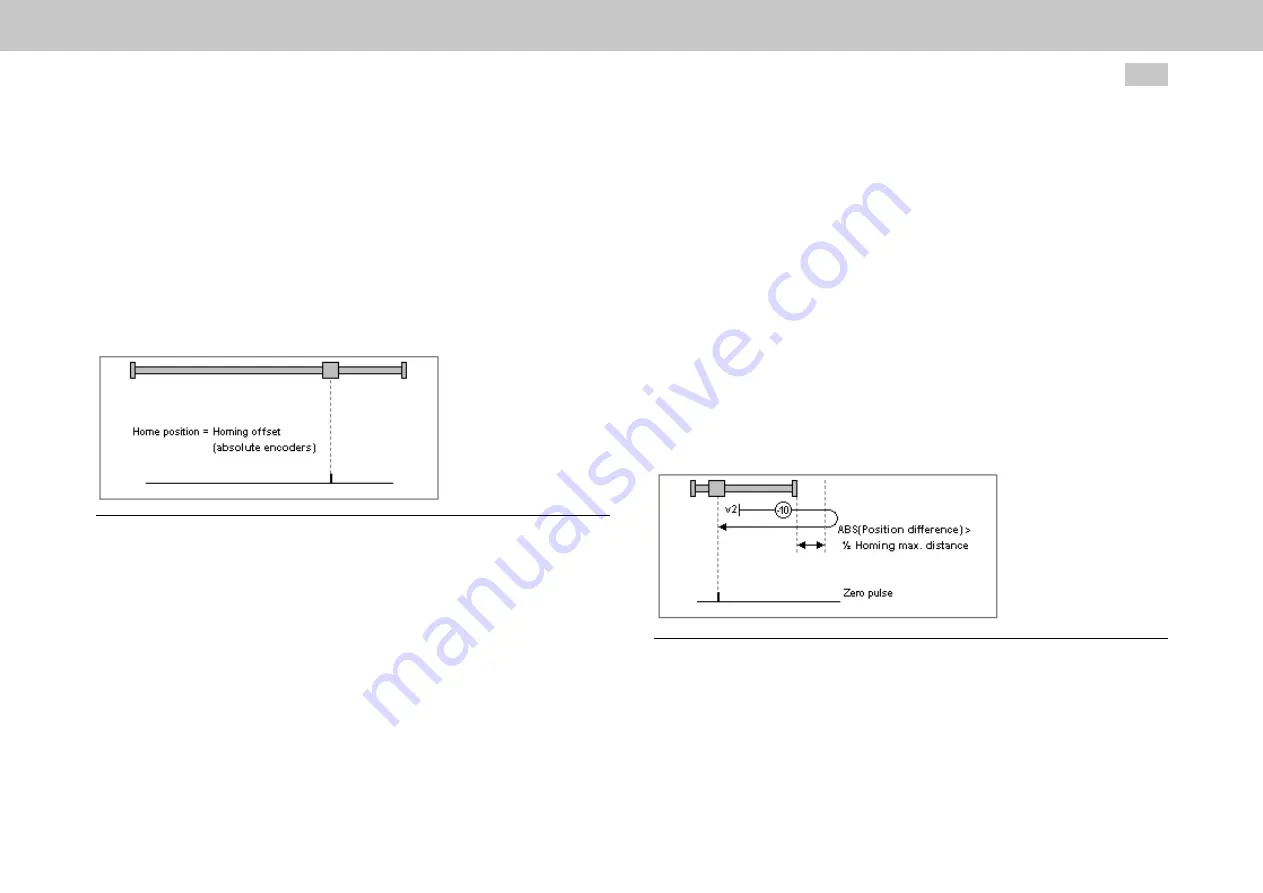
8.5.3 Method (-12): Set absolute position (absolute meas-
uring system)
To set the machine homing point, the rotor or the linear axis is moved to the machine
homing point. The desired actual position is written to the parameter "Offset" P 2234
MPRO_402_Homeoffset. Afterward, the axis must be referenced once. Every time
the axis is started thereafter, the absolute position is calculated automatically. Every
time a new homing operation is initiated, the machine homing point is reset to the
current position.
Image 8.40: Set the machine homing point
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
252
8 Motion profile
8.5.4 Method (-10) and Method (-11): Move to block with
zero pulse
Tracking error monitoring is switched off during the homing procedure.
The maximum permissible torque can be reduced specifically during the homing
operation. To do so, parameter P 0225 MPRO_REF_HOMING_TMaxScale must be
set in the range of 0-100%. Note that this parameter replaces parameter P 0332
CON_SCON_TMaxScale during the homing run.
8.5.4.1 Method (-10): Rightward direction of travel
With P 0169 MPRO_REF_HOMING_MaxDistance the positioning range in which to
search for the block is specified. After approaching the block, the drive reverses the
direction of rotation until a zero pulse is detected. The first zero pulse after reversing
direction corresponds to the zero point. An offset can be programmed in the screen.
Image 8.41: Move to block, direction of movement right with zero pulse
8.5.4.2 Method (-11): Leftward direction of travel
With P 0169 P 0169 MPRO_REF_HOMING_MaxDistance the positioning range in
which to search for the block is specified. After approaching the block, the drive
reverses the direction of rotation until a zero pulse is detected. The first zero pulse







































































