





























MOT_Filt_Sel = (MCHOKE)1
Has no effect on the current setpoint calculation. Instead, it just deactivates the
current controller decoupling network. If necessary, the calculated motor terminal
voltage components (before the voltage drop caused by the motor choke) can be
viewed using scope signals usdmot_SinFilt, usqmot_SinFilt. If there are no negative
influences on the current control stability, it is recommended not to use this setting.
Instead, you can select MOT_Filt_Sel = 0 and add the motor choke’s inductance to
the value in MOT_Lsig.
MOT_Filt_Sel = (SINFILT)2
Ensures that the capacitor current components will be calculated based on the
above equations and that they will be added to current setpoint components isdref,
isqref. Moreover, the current controller decoupling network will be deactivated. The
calculated values of the motor terminal voltage and capacitor current components
can be viewed with scope signals usdmot_SinFilt, usqmot_SinFilt and isdpre_SinFilt,
isqpre_SinFilt respectively.
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
49
5 Motor
x
x
x
4p
2π
f
s
i
Sd,ref
L
s
-
L
s
i
Sq,ref
u
Sd,mot
u
Sq,mot
C
f
-
C
f
x
i
Sd,pre
i
Sq,pre
to current controller
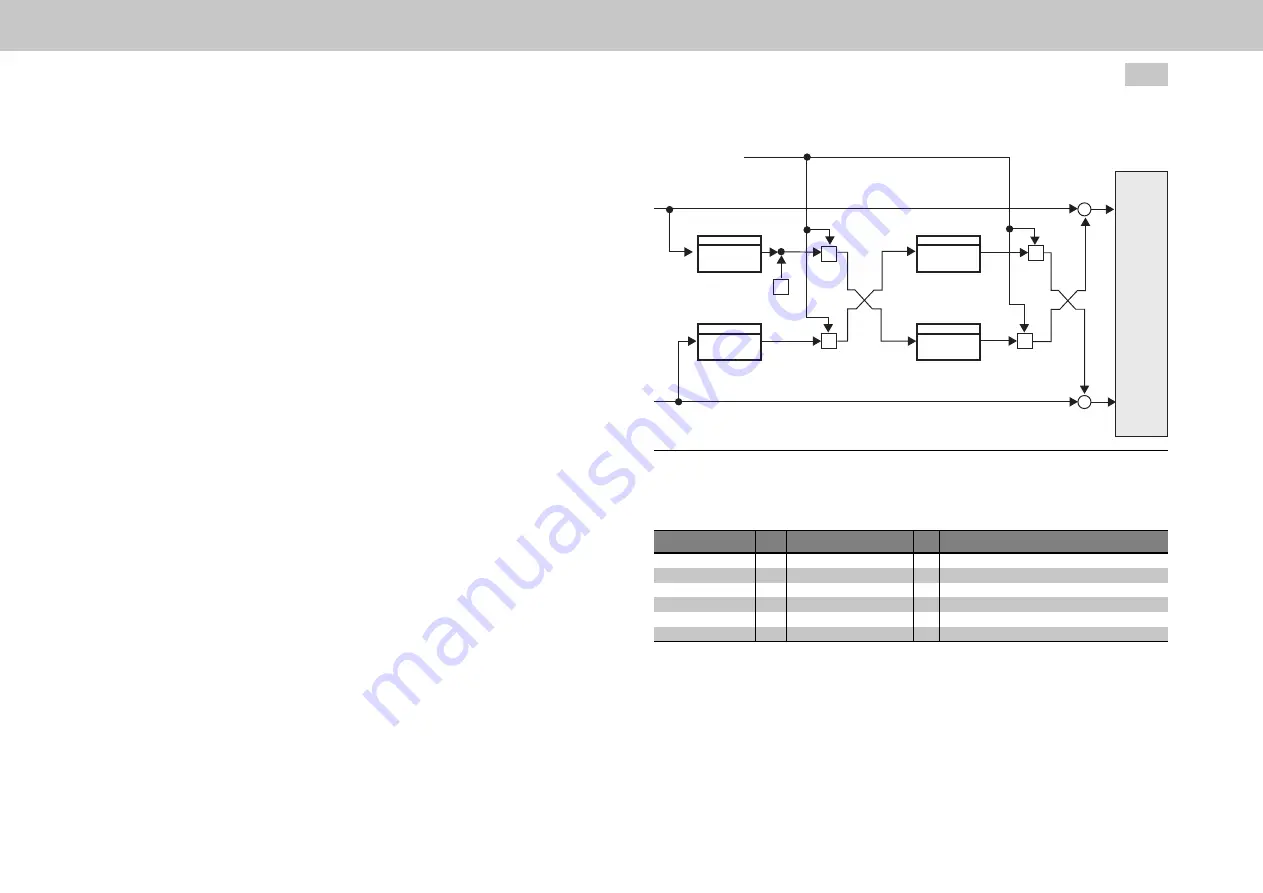
Image 5.17: Diagram of additive current setpoint calculation for sine wave filters
5.7.3 Parameters
ID
Index Name
Unit Description
462
0
MOT_FluxNom
Vs
471
0
MOT_Lsig
mH
2900
0
MOT_Filt_Sel
Motor filter: selector
2901
MOT_Filt_Para
Motor filter: Settings
2901
0
L_Filt
mH Motor filter: Choke or filter inductance
2901
1
C_Filt
nF
Motor filter: Capacitance (delta configuration)
Table 5.10: “Motor filter” parameters







































































