





























No.
Action
--
- The teaching and calculation are thus finished.
- The position source used has been stored internally.
- The compensation table is available for use immediately.
11
Stop control
12
Start the compensation:
P 382[0] - CON_TCoggComp > 0
After this, the q-current feed forward control becomes active when the control
is restarted.
13
Save device data.
- The position source used by the teaching is also saved here. It will later be
used for the compensation once again in exactly the same manner.
Table 7.5: Overall procedure for detent torque compensation
7.3.5.3.1 Scope recording: speed ‘before' and ‘after'
A significant improvement in the speed progression is noticeable in the ‘yellow’
scope signal (13): nact [rpm]: cur. speed from filter.
Image 7.11: Before detent torque compensation (without)
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
121
7 Control
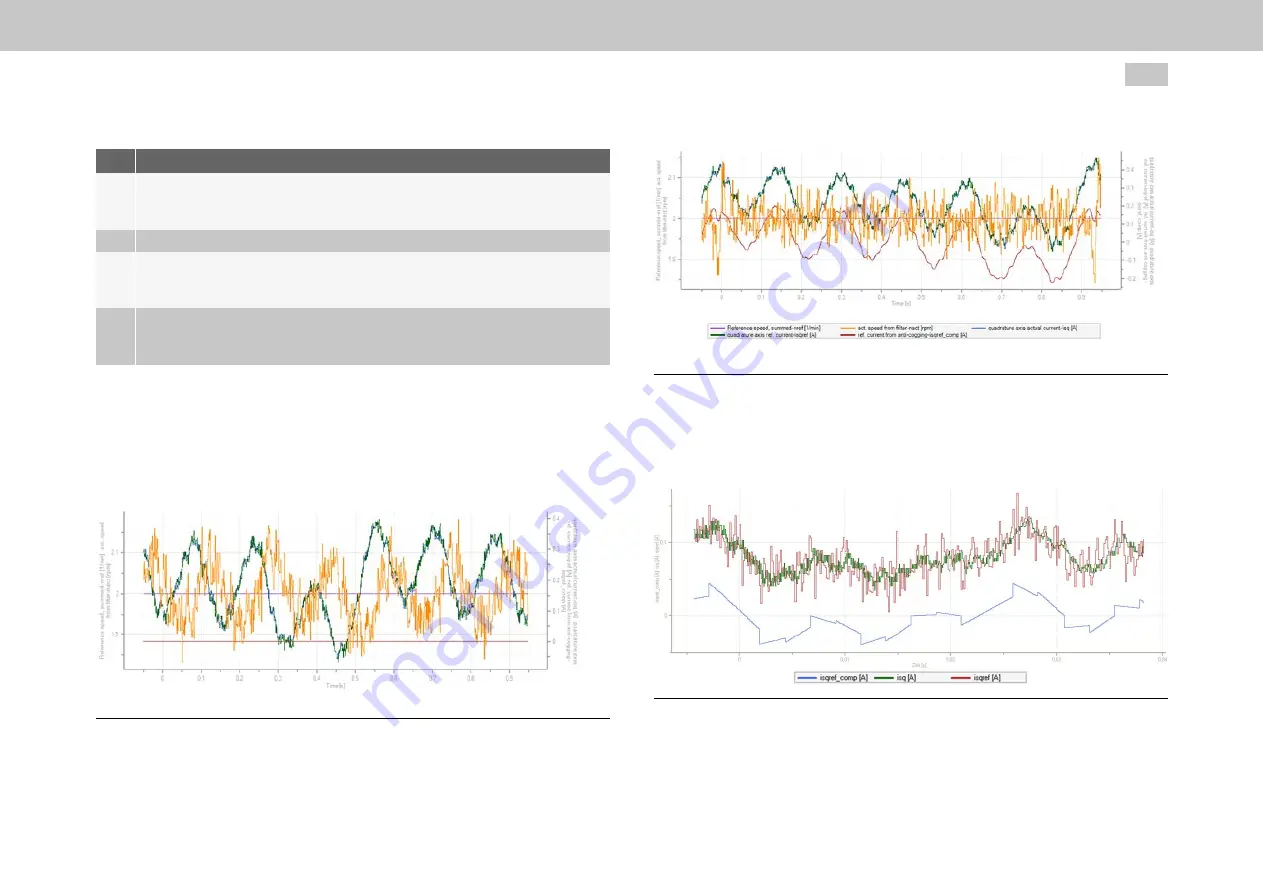
Image 7.12: After enabling detent torque compensation (with) (please keep the Y
axis scaling in mind!)
Possible monitoring via scope signal (69) isqref_comp [A]: ref. current from anti-cog-
ging --> in ‘blue' here
Image 7.13: Monitoring with isqref_comp (69)







































































