





























SSI wire break monitoring (bit monitoring during monoflop time)
If monitoring is enabled, the controller, as the SSI clock master, will read data for one
more clock cycle after the data bits (reading data after the data bits end is
permissible). The bit that the master reads in addition to the data bits this way comes
from the SSI encoder’s monoflop time. At the time corresponding to this bit, the SSI
encoder must drive the data lines with a logic 0. If the data lines on connector X8 are
open, a logic 1 will be read here. The bit monitoring at this point makes it possible to
determine whether the SSI data lines are being actively driven with a logic 0 at this
point (no “wire break”) or are not (“wire break”). SSI wire break monitoring can be
disabled by setting P 576[0] - ENC_CH3_Mode to 0001h.
Mode parameters and CycleCount parameters
P 576[0] - ENC_CH3_Mode can be used to run a parity evaluation after the data. In
addition, ENC_CH3_Mode makes it possible to run special SSI encoders that deliver
one or more special bits after the data. In this case, the MSD Servo Drive will not
evaluate these bits – this mode is meant to make it possible to work with SSI
encoders that require for these bits to be sampled. P 636[0] - ENC_CH3_
CycleCount makes it possible to run slower SSI encoders that cannot handle the
required cycle of 125 µs. The control characteristics will deteriorate when using this
type of SSI encoder, which is why doing so is
not recommended.
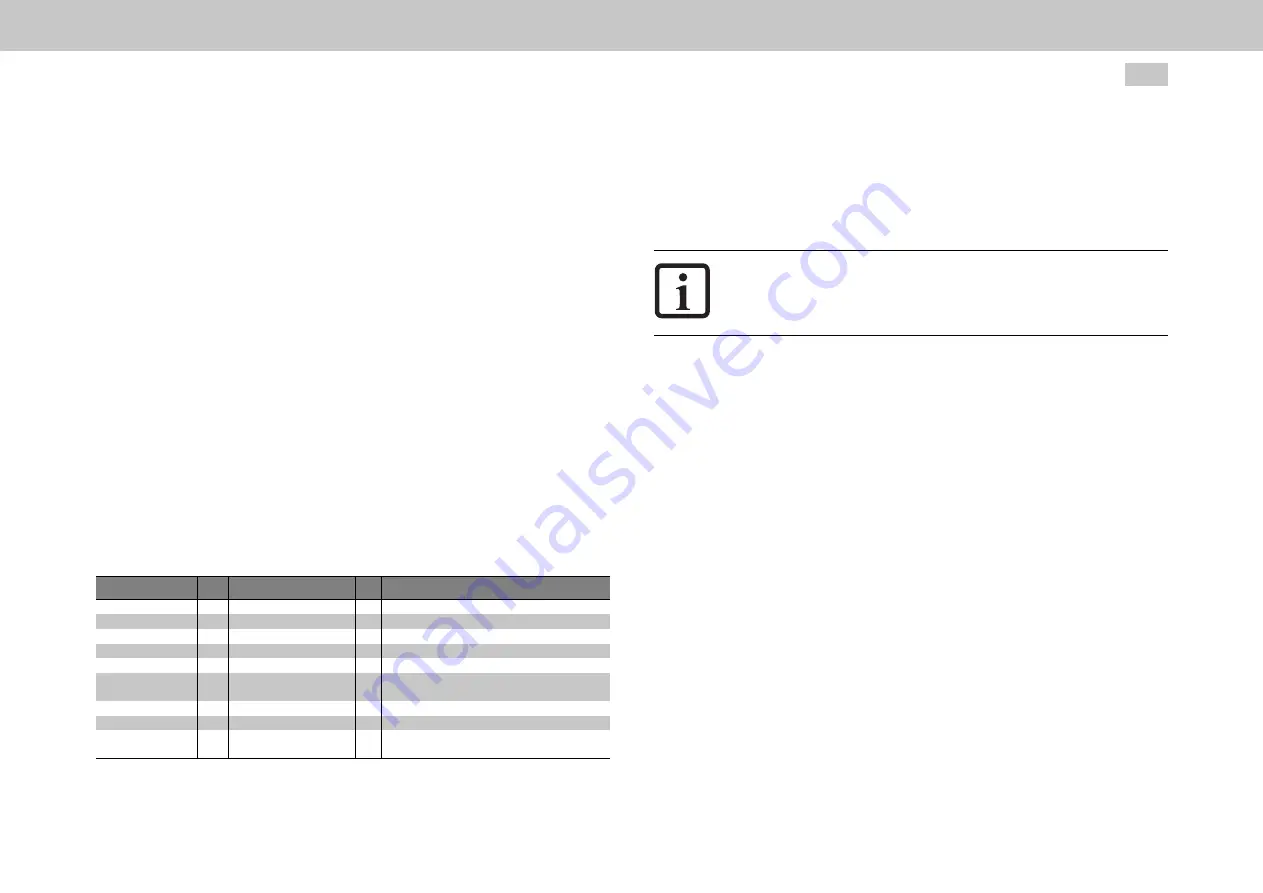
ID
Index Name
Unit Description
507
ENC_CH3_Sel = 2
=SSI(2)
573
0
ENC_CH3_MultiT
Number of MultiTurn bits (absolute encoder)
574
0
ENC_CH3_SingleT
Number of SingleTurn bits (absolute encoder)
575
0
ENC_CH3_Code
Code selection (SSI absolute encoder)
576
0
ENC_CH3_Mode
Mode selection (SSI absolute encoder)
584
0
ENC_CH3_MTBase
Minimum MultiTurn position (SSI absolute
encoder)
585
0
ENC_CH3_MTEnable
Channel 1: Multi-turn as single-turn
600
0
ENC_CH3_Position
inc
Position encoder channel 1
636
0
ENC_CH3_CycleCount
Channel 3: Position encoder sampling cycle (n x
125 µsec)
Table 6.25: Encoder configuration channel 3 (X8) - SSI parameters
MOOG
ID No.: CB40859-001 Date: 11/2020
MSD Servo Drive - Device Help
88
6 Encoder
The Sel, Lines, MultiT and SingleT parameters are self-explanatory.
Other parameters, such as MTBase and MTEnable, are described elsewhere (see
Section "Channel 3: Interface X8 (optional)" on page 76 and Section "Sin/Cos /
NOTE
l
Linear SSI encoders will be treated as rotary SSI encoders. In this
case, it is impossible to determine that the system is a linear
encoder system based on the encoder head.
l
P 573[0] - ENC_CH3_MultiT
= Number of multi-turn bits: 0..14
Due to the design of the cyclical SSI interface as a motor feedback interface,
the number of multi-turn bits is limited to 14 (no limit to 14 bits in the case of a
Sin/Cos interface with SSI one-time reading).
l
P 575[0] - ENC_CH3_Code
= SSI decoding: BINARY(0) or GRAY(1)
Gray decoding will be selected by default. The other option is to use binary
decoding.
l
P 576[0] - ENC_CH3_Mode
= Available SSI auxiliary settings
This parameter has a 16-bit hex value. With the default setting (0000h), SSI
wire break monitoring will be enabled. A value of 0001h will disable SSI wire
break monitoring, meaning that one bit less will be read.
Following is a list of what some of the terms in the table below stand for:
o
Data = Sequence of all data bits
o
EncObs = Wire break bit
o
Nothing = No bit
o
POdd = Odd parity bit
o
PEven = Even parity bit
o
Free = A free bit







































































