



























MDS-E/EH Series Instruction Manual
9 Power Backup System
448
IB-1501229-F
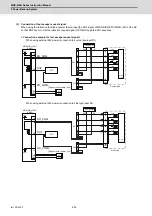
(1) Connection of Regenerative Resistor Unit
Connect the PFU connection terminal R1/R2 of the regenerative resistor for external option power backup unit
between the regenerative resistor connection terminals R1 and R2 in TE5.
The regenerative resistor generates heats, so wire and install the unit while taking care to safety. When using the
regenerative resistor, make sure that flammable matters, such as cables, do not contact the resistor, and provide a
cover on the machine so that dust or oil does not accumulate on the resistor and ignite.
9.1.3 Setup of Deceleration and Stop Function at Power Failure
(1) Setting the rotary switch (SW1)
Set the rotary switch (SW1) of MDS-D/DH-PFU depending on the regenerative resistor to be used.
• MDS-D-PFU
Rotary switch (SW1) setting : 2 R-UNIT-7 is connected
• MDS-DH-PFU
Rotary switch (SW1) setting : 1 R-UNIT-6 is connected
(2) Setting the dip switches (SW2, SW3)
Normally all OFF.
CAUTION
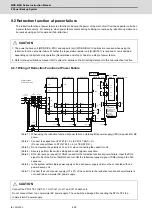
1. Make sure to install the regenerative resistor for external option power backup unit to enable the deceleration and stop
function at power failure.
2. Only the designated combination can be used for the external option regenerative resistor and drive unit. There is a risk
of fire, so always use the designated combination.
CAUTION
Refer to "9.3.1 How to Set Rotary Switch and Dip Switches" for detail specifications on the rotary switch (SW1) and dip
switches (SW2, SW3) of MDS-D/DH-PFU.
TE5
R2
R1
R2
R1
AL1
AL2
CN43
10A
10B
E
MDS-D/DH-PFU
R-UNIT
5.5mm
2
Available wire size
:
0.2 mm
2
Available wire size
:
5m or less
Twist or bind with a cable tie
Содержание MDS-E
Страница 1: ......
Страница 3: ......
Страница 15: ......
Страница 17: ......
Страница 19: ......
Страница 21: ......
Страница 31: ......
Страница 32: ...1 IB 1501229 F 1 Installation ...
Страница 76: ...45 IB 1501229 F 2 Wiring and Connection ...
Страница 132: ...101 IB 1501229 F 3 Safety Function ...
Страница 142: ...111 IB 1501229 F 4 Setup ...
Страница 277: ...MDS E EH Series Instruction Manual 4 Setup 246 IB 1501229 F ...
Страница 278: ...247 IB 1501229 F 5 Servo Adjustment ...
Страница 351: ...MDS E EH Series Instruction Manual 5 Servo Adjustment 320 IB 1501229 F ...
Страница 352: ...321 IB 1501229 F 6 Spindle Adjustment ...
Страница 404: ...373 IB 1501229 F 7 Troubleshooting ...
Страница 455: ...MDS E EH Series Instruction Manual 7 Troubleshooting 424 IB 1501229 F ...
Страница 456: ...425 IB 1501229 F 8 Maintenance ...
Страница 475: ...MDS E EH Series Instruction Manual 8 Maintenance 444 IB 1501229 F ...
Страница 476: ...445 IB 1501229 F 9 Power Backup System ...
Страница 494: ...463 IB 1501229 F 10 Appx 1 Cable and Connector Assembly ...
Страница 504: ...473 IB 1501229 F 11 Appx 2 D A Output Specifications for Drive Unit ...
Страница 513: ...MDS E EH Series Instruction Manual 11 Appx 2 D A Output Specifications for Drive Unit 482 IB 1501229 F ...
Страница 514: ...483 IB 1501229 F 12 Appx 3 Protection Function ...
Страница 523: ...MDS E EH Series Instruction Manual 12 Appx 3 Protection Function 492 IB 1501229 F ...
Страница 524: ...493 IB 1501229 F 13 Appx 4 Compliance to EC Directives ...
Страница 528: ...497 IB 1501229 F 14 Appx 5 EMC Installation Guidelines ...
Страница 540: ...509 IB 1501229 F 15 Appx 6 Higher Harmonic Suppression Measure Guidelines ...
Страница 545: ...MDS E EH Series Instruction Manual 15 Appx 6 Higher Harmonic Suppression Measure Guidelines 514 IB 1501229 F ...
Страница 550: ......
Страница 554: ......







































































