



























MDS-E/EH Series Instruction Manual
5 Servo Adjustment
290
IB-1501229-F
5.4 Adjustment during Full Closed Loop Control
5.4.1 Outline
(1) Full closed loop control
The servo control is all closed loop control using the encoder's feedback. "Full closed loop control" is the system
that directly detects the machine position using a linear scale, whereas the general "semi-closed loop" is the one
that detects the motor position.
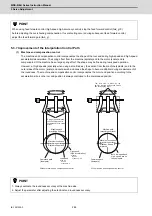
In a machine that drives a table with a ball screw, the following factors exist between the motor and table end:
[1] Coupling or ball screw table bracket's backlash
[2] Ball screw pitch error
These can adversely affect the accuracy. If the table position is directly detected with a linear scale, high-accuracy
position control which is not affected by backlash or pitch error is possible. However, with the full closed loop
system, the machine system is also directly included in the position loop control. Thus, if the machine's rigidity is not
high, the gain cannot be increased, and the required high accuracy cannot be attained.
The procedures for adjusting the servo with the full closed loop system are the same as the semi-closed loop
system. Vibration or overshooting will occur easily, so the position loop gain is generally lower than the semi-closed
loop.
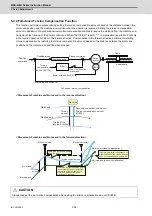
(2) Overrun detection
With the full closed system, the position feedback (FB) detected with the linear scale is used for the position control.
However, the motor position FB is detected at the same time, and the error of both FB is observed. If this FB error
exceeds the servo parameter SV054 setting value, alarm 43 will be detected and the system will stop to prevent
overrunning due to a scale FB error from occurring.
【
#2254
】
SV054 ORE Overrun detection width in closed loop control
Set the overrun detection width in the full-closed loop control.
When the gap between the motor side encoder and the linear scale (machine side encoder) exceeds
the value set by this parameter, it will be judged as overrun and "Alarm 43" will be detected.
When "-1" is set, if the differential velocity between the motor side encoder and the machine side
encoder exceeds the 30% of the maximum motor speed, it will be judged as overrun and "Alarm 43"
will be detected.
When "0" is set, overrun will be detected with a 2mm width.
For linear servo/direct-drive motor system
Not used. Set to "0".
---Setting range---
-1 to 32767 (mm)
However, when SV084/bitD=1, the setting range is from -1 to 32767 (
μ
m).
Position
command
PGN
+
-
FB error
Position droop
Servo
motor
ENC
Linear scale
Table
Speed command
Position FB
Position FB
+
-
Overrun detection control
Содержание MDS-E
Страница 1: ......
Страница 3: ......
Страница 15: ......
Страница 17: ......
Страница 19: ......
Страница 21: ......
Страница 31: ......
Страница 32: ...1 IB 1501229 F 1 Installation ...
Страница 76: ...45 IB 1501229 F 2 Wiring and Connection ...
Страница 132: ...101 IB 1501229 F 3 Safety Function ...
Страница 142: ...111 IB 1501229 F 4 Setup ...
Страница 277: ...MDS E EH Series Instruction Manual 4 Setup 246 IB 1501229 F ...
Страница 278: ...247 IB 1501229 F 5 Servo Adjustment ...
Страница 351: ...MDS E EH Series Instruction Manual 5 Servo Adjustment 320 IB 1501229 F ...
Страница 352: ...321 IB 1501229 F 6 Spindle Adjustment ...
Страница 404: ...373 IB 1501229 F 7 Troubleshooting ...
Страница 455: ...MDS E EH Series Instruction Manual 7 Troubleshooting 424 IB 1501229 F ...
Страница 456: ...425 IB 1501229 F 8 Maintenance ...
Страница 475: ...MDS E EH Series Instruction Manual 8 Maintenance 444 IB 1501229 F ...
Страница 476: ...445 IB 1501229 F 9 Power Backup System ...
Страница 494: ...463 IB 1501229 F 10 Appx 1 Cable and Connector Assembly ...
Страница 504: ...473 IB 1501229 F 11 Appx 2 D A Output Specifications for Drive Unit ...
Страница 513: ...MDS E EH Series Instruction Manual 11 Appx 2 D A Output Specifications for Drive Unit 482 IB 1501229 F ...
Страница 514: ...483 IB 1501229 F 12 Appx 3 Protection Function ...
Страница 523: ...MDS E EH Series Instruction Manual 12 Appx 3 Protection Function 492 IB 1501229 F ...
Страница 524: ...493 IB 1501229 F 13 Appx 4 Compliance to EC Directives ...
Страница 528: ...497 IB 1501229 F 14 Appx 5 EMC Installation Guidelines ...
Страница 540: ...509 IB 1501229 F 15 Appx 6 Higher Harmonic Suppression Measure Guidelines ...
Страница 545: ...MDS E EH Series Instruction Manual 15 Appx 6 Higher Harmonic Suppression Measure Guidelines 514 IB 1501229 F ...
Страница 550: ......
Страница 554: ......







































































