





























Tuning
9.3 One-button auto tuning
SINAMICS V90, SIMOTICS S-1FL6
320
Operating Instructions, 04/2019, A5E36037884-007
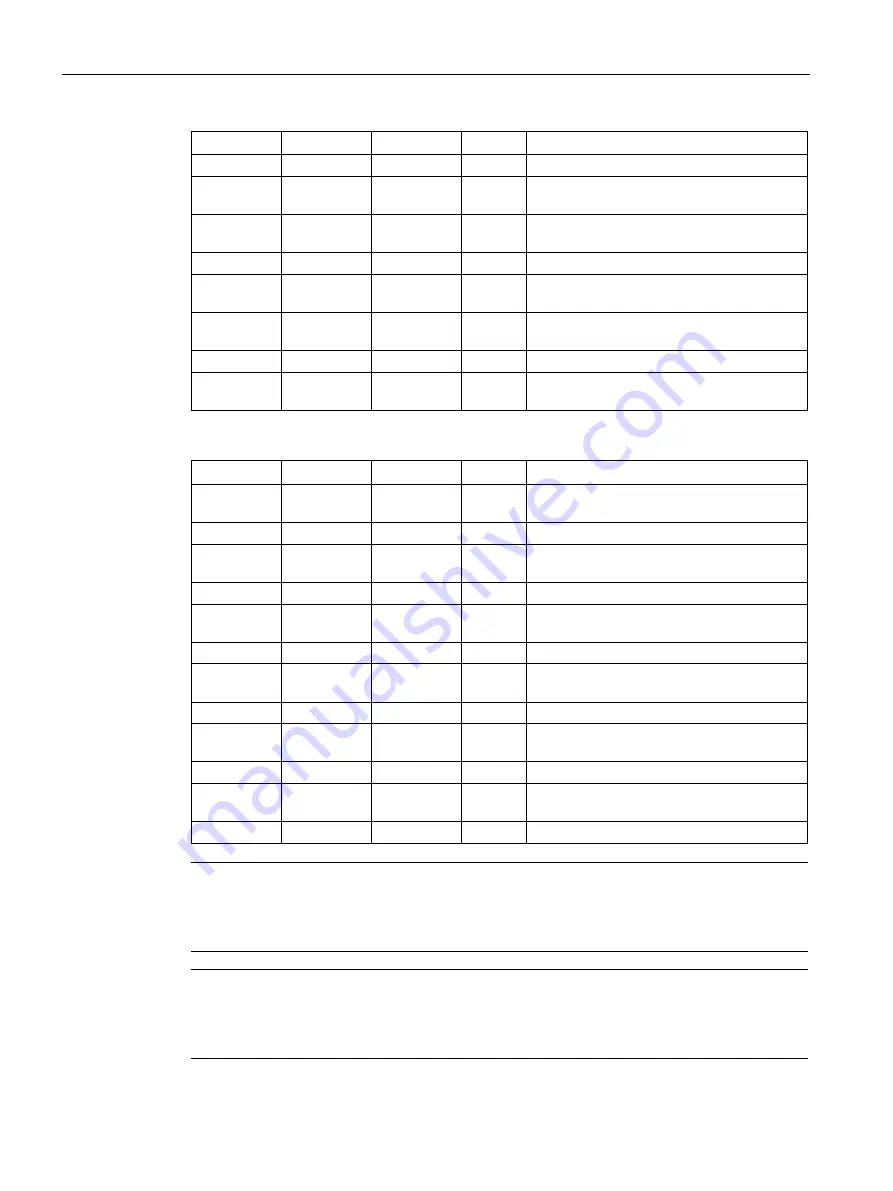
Parameter
Range
Default
Unit
Description
p2533
0 to 1000
0
ms
LR position setpoint filter time constant
p2572
1 to 2000000 Motor de-
pendent
1000
LU/s
2
IPos maximum acceleration
p2573
1 to 2000000 Motor de-
pendent
1000
LU/s
2
IPos maximum deceleration
p29022
1 to 10000
1
-
Ratio of load moment of inertia
p29110[0]
0.00 to
300.00
Motor de-
pendent
1000/mi
n
Position loop gain 1
p29120[0]
0 to 999999
Motor de-
pendent
Nms/rad Speed loop gain 1
p29121[0]
0 to 100000
15
ms
Speed loop integral time 1
p29111
0.00 to
200.00
0.00
%
Position loop feed forward gain
After one-button tuning, four current setpoint filters can be activated at most. The following
parameters related to the filters may be tuned accordingly.
Parameter
Range
Default
Unit
Description
p1663
0.5 to 16000
1000
Hz
Natural frequency of current notch filter 2
denominator.
p1664
0.001 to 10
0.3
-
Damp of current notch filter 2 denominator.
p1665
0.5 to 16000
1000
Hz
Natural frequency of current notch filter 2
numerator.
p1666
0.0 to 10
0.01
-
Damp of current notch filter 2 numerator.
p1668
0.5 to 16000
1000
Hz
Natural frequency of current notch filter 3
denominator.
p1669
0.001 to 10
0.3
-
Damp of current notch filter 3 denominator.
p1670
0.5 to 16000
1000
Hz
Natural frequency of current notch filter 3
numerator.
p1671
0.0 to 10
0.01
-
Damp of current notch filter 3 numerator.
p1673
0.5 to 16000
1000
Hz
Natural frequency of current notch filter 4
denominator.
p1674
0.001 to 10
0.3
-
Damp of current notch filter 4 denominator.
p1675
0.5 to 16000
1000
Hz-
Natural frequency of current notch filter 4
numerator.
p1676
0.0 to 10
0.01
-
Damp of current notch filter 4 numerator.
Note
After one-button auto tuning is activated, do not change other auto tuning related
control/filter parameters since these parameters can be set automatically and your changes
will not be accepted.
Note
One-button auto tuning may cause some changes of the control parameters. When the
system rigidity is low, this may lead to a situation that when you set EMGS = 0, the motor
needs take long time to stop.







































































