





























Control functions
7.5 Internal position control (IPos)
SINAMICS V90, SIMOTICS S-1FL6
244
Operating Instructions, 04/2019, A5E36037884-007
Follow the steps below to perform referencing with this mode:
1.
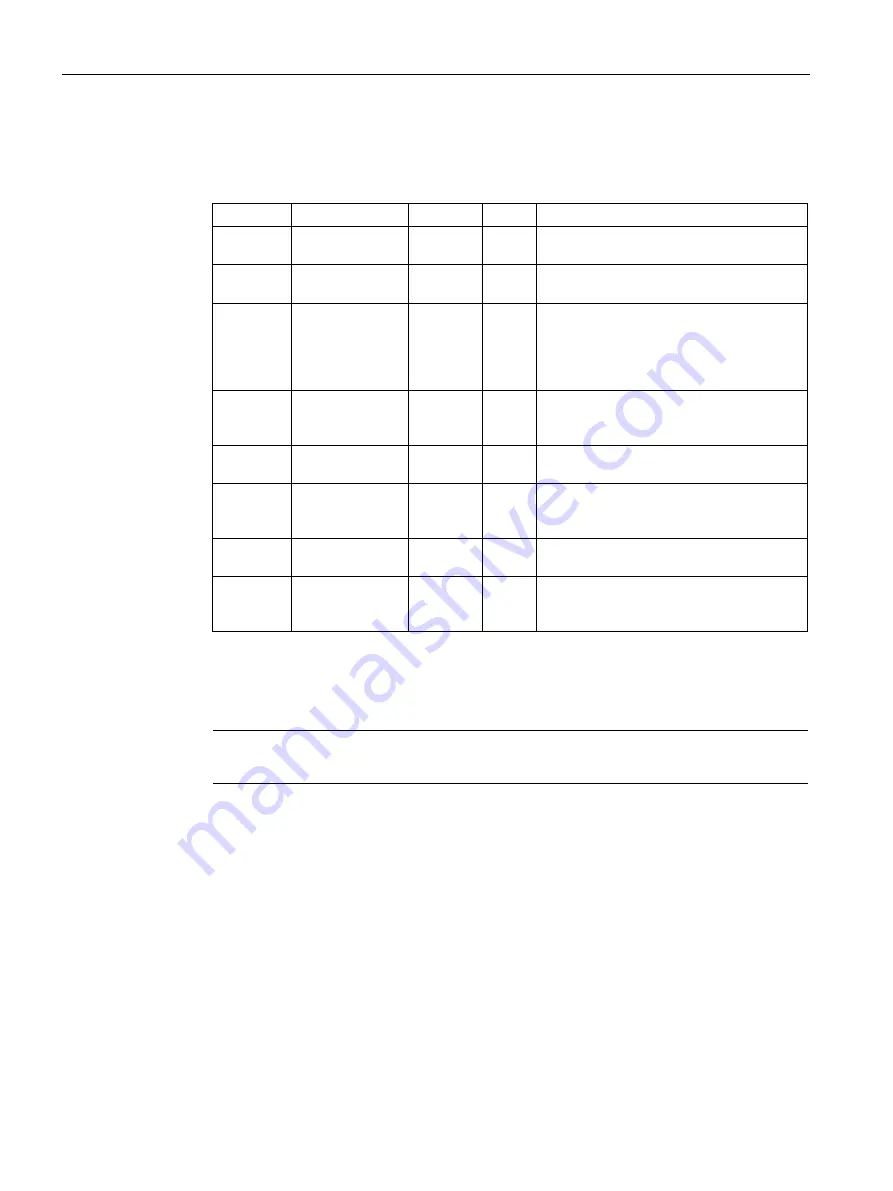
Set relevant parameters.
Parameter
Range
Default
Unit
Description
p2599
-2147482648 to
2147482647
0
LU
Sets the position value for the reference
point coordinate.
p2600
-2147482648 to
2147482647
0
LU
Reference point offset
p2604
0 to 1
0
-
Sets signal source for start direction of
searching:
•
0: start in positive direction
•
1: start in negative direction
p2605
1 to 40000000
5000
1000
LU/mi
n
Speed for searching the cam
p2606
0 to 2147482647 21474826
47
LU
Maximum distance for searching the cam
p2608
1 to 40000000
300
1000
LU/mi
n
Speed for searching zero mark
p2609
0 to 2147482647
20000
LU
Maximum distance for searching the zero
mark
p2611
1 to 40000000
300
1000
LU/mi
n
Speed for searching reference point
2.
Configure signals SREF and REF.
Refer to Chapter "Digital inputs/outputs (DIs/DOs) (Page 122)" for reference.
3.
Trigger SREF to a rising edge to start referencing.
Note
During the referencing, if SREF is OFF, the referencing stops.
4.
If the servo motor reaches the reference point, the signal REFOK (if configured) is output.
5.
Switch off the signal SREF, and the referencing finishes successfully.
Encoder zero mark only (p29240=2)
In this mode, there is no cam available. The referencing is triggered by signal SREF. After
that, the servo motor accelerates to the speed specified in p2608 and the direction (CW or
CCW) is defined by p2604. When the servo motor reaches the first zero mark, it starts to
travel towards the reference point defined in p2600 with the speed specified by p2611. When
the servo motor reaches the reference point (p2599), the signal REFOK is output. Switch off
the signal SREF (1→0) and the referencing finishes successfully.







































































