





























11-20
11-4 Troubleshooting
OMNUC G5-Series AC Servo Drives Users Manual (Built-in MECHATROLINK-II communications type)
11
Error and Maintenance
29
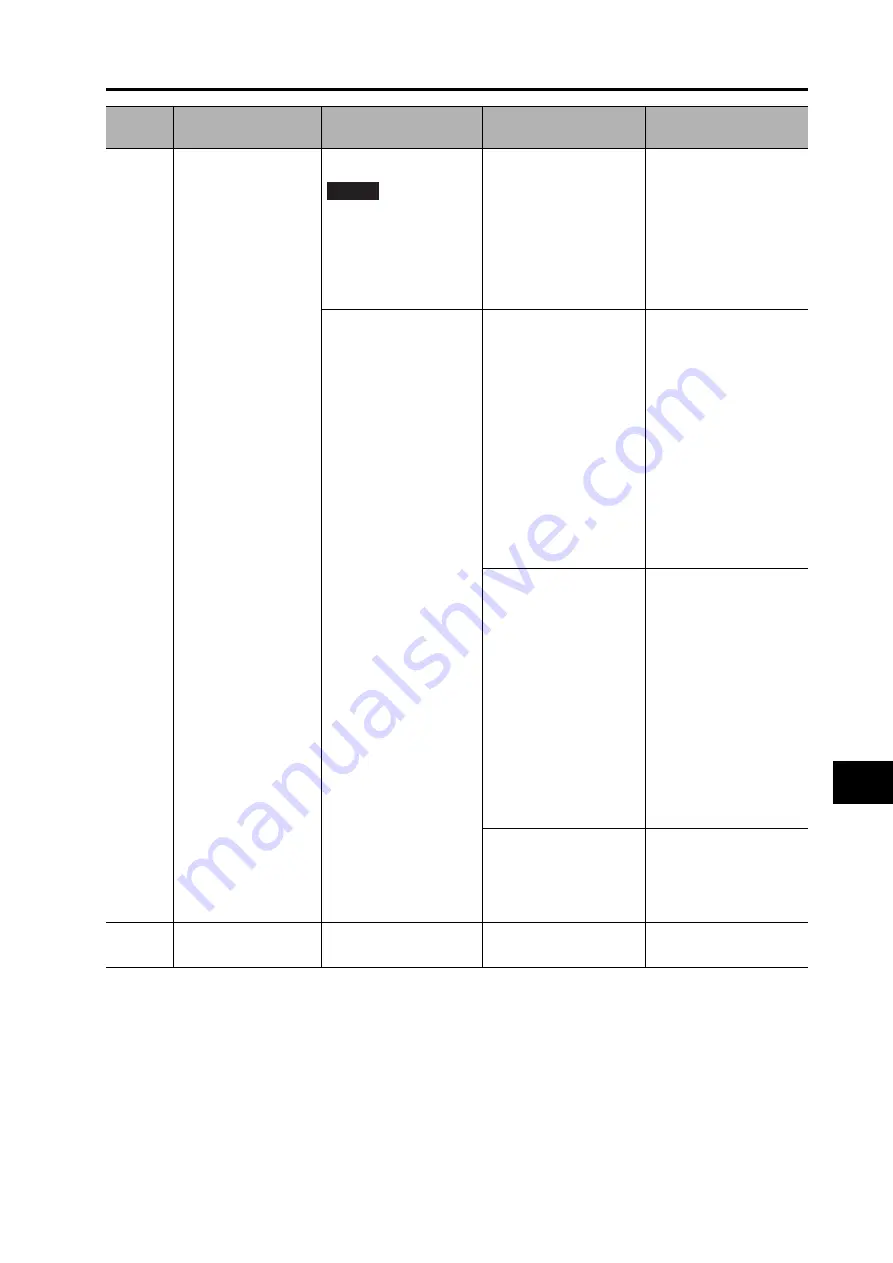
Error counter overflow
Occurs when the control
power is turned ON.
• During the initialization
of position data, the
value that is obtained
by dividing the
Absolute encoder
position (pulse unit) by
the Electronic gear
ratio exceeded
2
31
(or
2147483648).
• Review the operation
range of Absolute
encoder position and
the electronic gear
ratio.
Occurs during operation.
• The error counter value
for the encoder pulse
reference exceeded
2
29
(536870912).
• Check that the motor
rotates in accordance
with the position
command.
• Check that the output
torque is not saturated
on the torque monitor.
• Adjust the gain.
• Maximize the set
values on the No.1
Torque Limit (Pn013)
and the No2. Torque
Limit (Pn522).
• Wire the encoder
correctly.
• The position error in
command unit
exceeded
2
30
or
1073741824.
• Check that the motor
rotates in accordance
with the position
command.
• Check that the output
torque is not saturated
on the torque monitor.
• Adjust the gain.
• Maximize the set
values on the No.1
Torque Limit (Pn013)
and the No2. Torque
Limit (Pn522).
• Wire the encoder
correctly.
• The value set on the
Final Distance for
Origin Return
(Pn825).exceeded
2
31
(or 2147483648).
• Review the value set
on the Final Distance
for Origin Return
(Pn825) and for the
electronic gear ratio.
30
(st)
Safety input error
Occurs during operation.
• Safety input signal
turned OFF.
• Check the statuses of
safety inputs 1 and 2.
Alarm
number
Error conditions
Status when error
occurs
Cause
Measures
ABS





















































